
129 results
The effect of older age on outcomes of rTMS treatment for treatment-resistant depression
-
- Journal:
- International Psychogeriatrics , First View
- Published online by Cambridge University Press:
- 25 March 2024, pp. 1-6
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
A multi-shot target-wheel assembly for high-repetition-rate, laser-driven proton acceleration
-
- Journal:
- High Power Laser Science and Engineering / Accepted manuscript
- Published online by Cambridge University Press:
- 12 March 2024, pp. 1-8
-
- Article
-
- You have access
- Open access
- Export citation
64 Neuroimaging Evidence of Neurodegenerative Disease in Former Professional American Football Players Who “Fail” Validity Testing: A Case Series
-
- Journal:
- Journal of the International Neuropsychological Society / Volume 29 / Issue s1 / November 2023
- Published online by Cambridge University Press:
- 21 December 2023, pp. 574-575
-
- Article
-
- You have access
- Export citation
73 Sex Differences in Verbal Memory and Alzheimer’s Disease Biomarkers in Clinically Normal Older Adults: Role of SNAP-25 Genetics
-
- Journal:
- Journal of the International Neuropsychological Society / Volume 29 / Issue s1 / November 2023
- Published online by Cambridge University Press:
- 21 December 2023, pp. 377-378
-
- Article
-
- You have access
- Export citation
Assessing evidence supporting cannabis harm reduction practices for adolescents at clinical high-risk for psychosis: a review and clinical implementation tool
-
- Journal:
- Psychological Medicine / Volume 54 / Issue 2 / January 2024
- Published online by Cambridge University Press:
- 26 October 2023, pp. 245-255
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
La conexión entre ambientes de tierras bajas y altas en el límite Cuyo Patagonia (Argentina): Un análisis sobre el transporte y uso de obsidiana Laguna del Maule
-
- Journal:
- Latin American Antiquity , First View
- Published online by Cambridge University Press:
- 20 September 2023, pp. 1-17
-
- Article
- Export citation
20 years of experience with the Fontan procedure: characteristics and clinical outcomes of children in a tertiary referral hospital
-
- Journal:
- Cardiology in the Young / Volume 33 / Issue 8 / August 2023
- Published online by Cambridge University Press:
- 07 October 2022, pp. 1378-1382
-
- Article
- Export citation
Role of migration in the development of a first episode of psychosis
-
- Journal:
- European Psychiatry / Volume 65 / Issue S1 / June 2022
- Published online by Cambridge University Press:
- 01 September 2022, p. S633
-
- Article
-
- You have access
- Open access
- Export citation
Psychopathological networks in psychosis and changes over time: A long-term cohort study of first-episode psychosis
-
- Journal:
- European Psychiatry / Volume 65 / Issue S1 / June 2022
- Published online by Cambridge University Press:
- 01 September 2022, p. S247
-
- Article
-
- You have access
- Open access
- Export citation
Atrial fibrillation debut following first electroconvulsive therapy combined with venlafaxine: a case report and a literature review
-
- Journal:
- European Psychiatry / Volume 65 / Issue S1 / June 2022
- Published online by Cambridge University Press:
- 01 September 2022, pp. S560-S561
-
- Article
-
- You have access
- Open access
- Export citation
“Walking with myself by my side” - non-medical use of Ketamine
-
- Journal:
- European Psychiatry / Volume 65 / Issue S1 / June 2022
- Published online by Cambridge University Press:
- 01 September 2022, pp. S829-S830
-
- Article
-
- You have access
- Open access
- Export citation
How providing a low-cost water filter pitcher led Latino parents to reduce sugar-sweetened beverages and increase their water intake: explanatory qualitative results from the Water Up!@Home intervention trial
-
- Journal:
- Public Health Nutrition / Volume 25 / Issue 11 / November 2022
- Published online by Cambridge University Press:
- 19 August 2022, pp. 3195-3203
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Gyrokinetic analysis of an argon-seeded EDA H-mode in ASDEX Upgrade
-
- Journal:
- Journal of Plasma Physics / Volume 88 / Issue 3 / June 2022
- Published online by Cambridge University Press:
- 23 June 2022, 905880315
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Understanding edge-localised-mode (ELM)-free high-confinement (H-)mode scenarios is vital for developing practical future demonstration reactor scenarios. An argon-seeded EDA H-mode discharge performed in ASDEX Upgrade is computationally studied in detail for the first time with the gyrokinetic GENE code using experimental profiles and magnetic equilibrium as direct code inputs. Linear scans outline dominant instabilities in the regime and reveal distinct ion- and electron-scale wavenumber growth-rate peaks for two local core and two local pedestal top scenarios. Linear ion-scale growth rates are found to be relatively insensitive to the addition of argon, and collisionality scans demonstrate increased sensitivity in the pedestal top. The addition of an argon impurity profile while keeping the input main ion temperature gradient (ITG) largely unchanged is found to reduce ITG-driven turbulence in the outer core. Nonlinear electromagnetic simulations reveal close agreement with experimentally predicted heat fluxes in the core, outline key sensitivities to electron $\beta$
 and background $\boldsymbol{E\times B}$
and background $\boldsymbol{E\times B}$ shearing, and reveal gyrokinetic challenges in analysing the quasicoherent mode. Global electrostatic nonlinear simulations reduce local simulated heat transport overpredictions at the pedestal top. A quasilinear analysis finds that there is good core agreement but poor agreement in the pedestal between linear and nonlinear temperature and density fluctuation cross-phases. Local simulation limitations are elucidated and paths forward for future computation are suggested.
shearing, and reveal gyrokinetic challenges in analysing the quasicoherent mode. Global electrostatic nonlinear simulations reduce local simulated heat transport overpredictions at the pedestal top. A quasilinear analysis finds that there is good core agreement but poor agreement in the pedestal between linear and nonlinear temperature and density fluctuation cross-phases. Local simulation limitations are elucidated and paths forward for future computation are suggested.


Assessing a PSP (primary care support programme) from the point of view of the professionals involved: A joint-effort between primary care and psychiatric ward
-
- Journal:
- European Psychiatry / Volume 64 / Issue S1 / April 2021
- Published online by Cambridge University Press:
- 13 August 2021, p. S402
-
- Article
-
- You have access
- Open access
- Export citation
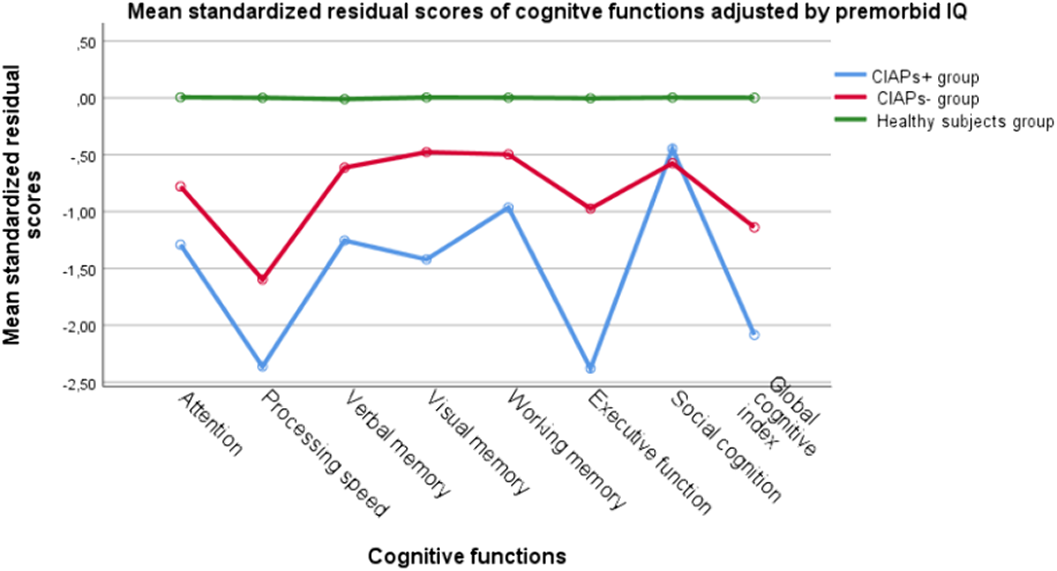
Cognitive impairment associated with psychosis (CIAPS): Validity of clinical criteria to detect cognitive impairment
-
- Journal:
- European Psychiatry / Volume 64 / Issue S1 / April 2021
- Published online by Cambridge University Press:
- 13 August 2021, pp. S519-S520
-
- Article
-
- You have access
- Open access
- Export citation
-
Introduction
Even though cognitive impairment is considered a hallmark of schizophrenia, it has not been included as a criterion into major diagnostic systems.
ObjectivesTo test whether a set of clinical-defined cognitive impairment criteria can have utility in the assessment of psychosis patients in clinical practice.
MethodsWe assessed 98 patients with a psychotic disorder, diagnosed using DSM 5 criteria. We developed a set of cognitive impairment associated with psychosis (CIAPs) criteria following the format of current DSM criteria and based on previous literature. The CIAPs criteria include: A) criterion for evidence of cognitive impairment after the beginning of illness; B) cognitive impairment clinically evidenced, affecting functioning in everyday activities in at least two out of six cognitive domains; C) and D) exclusion criterion for either delirium or other neurocognitive disorders, respectively, as causal agents of the cognitive impairment. The psychosis patients dichotomized by the CIAPs criteria were tested regarding the neuropsychological performance in attention, speed of processing, verbal memory, visual memory, working memory, executive function and social cognition tasks. Also a Global Cognitive Index was calculated.
ResultsForty-three patients with psychosis fulfilled the CIAPs criteria (43.9%). MANOVA profile analyses revealed a pattern of statistically significant deficits in all the cognitive dimensions except for social cognition in CIAPs+ patients regarding CIAPS-, with prominent deficits in processing speed and memory functions.
 Conclusions
ConclusionsThe CIAPs criteria could be an auxiliary method for clinicians to assess cognitive impairment. It may also permit clinical estimation of the influence of cognitive deficits on the ecological functioning of patients.
Conflict of interestThis work was supported by the Government of Navarra (grants 17/31, 18/41, 87/2014) and the Carlos III Health Institute (FEDER Funds) from the Spanish Ministry of Economy and Competitivity (14/01621 and 16/02148). Both had no further role in the study des

Bibliography
-
- Book:
- Nonlinear Solid Mechanics for Finite Element Analysis: Dynamics
- Published online:
- 26 February 2021
- Print publication:
- 18 March 2021, pp 326-328
-
- Chapter
- Export citation
4 - Discretization and Solution
-
- Book:
- Nonlinear Solid Mechanics for Finite Element Analysis: Dynamics
- Published online:
- 26 February 2021
- Print publication:
- 18 March 2021, pp 110-156
-
- Chapter
- Export citation
3 - Dynamic Equilibrium of Deformable Solids
-
- Book:
- Nonlinear Solid Mechanics for Finite Element Analysis: Dynamics
- Published online:
- 26 February 2021
- Print publication:
- 18 March 2021, pp 85-109
-
- Chapter
- Export citation
8 - Computer Implementation for Displacementbased Dynamics
-
- Book:
- Nonlinear Solid Mechanics for Finite Element Analysis: Dynamics
- Published online:
- 26 February 2021
- Print publication:
- 18 March 2021, pp 246-280
-
- Chapter
- Export citation
9 - Computational Implementation for Conservationlaw-Based Explicit Fast Dynamics
-
- Book:
- Nonlinear Solid Mechanics for Finite Element Analysis: Dynamics
- Published online:
- 26 February 2021
- Print publication:
- 18 March 2021, pp 281-305
-
- Chapter
- Export citation
