

I. Introduction
Artificial Intelligence (AI) is a discipline that is concerned with the generation of software systems that provide functions, the execution of which requires what is typically referred to by the word intelligence. Thereby, the corresponding tasks can be performed by pure software agents as well as by physical systems, such as robots or self-driving cars.
As the term ‘intelligence’ is already very difficult to define, the definition of AI is, of course, correspondingly difficult and numerous definitions can be found in the literature.Footnote 1 Among them are several approaches that are based on human behavior or thinking. For example, the Turing testFootnote 2 introduced by Alan Turing in 1950, in which the actions generated by the system or robot should not be distinguishable from those generated by humans, has to be mentioned in this context. Such a Turing test for systems interacting with humans would then mean, for example, that a human could no longer determine whether a conversation partner on the telephone is a human or software.
However, most current AI systems aim to generate agents that think or act rationally. To realize systems that think rationally, often logic-based representations and reasoning systems are used. The basic assumption here is that rational thinking entails rational action if the reasoning mechanisms used are correct. Another group of definitional approaches deals with the direct generation of rational actions. In such systems, the underlying representations often are not human-readable or easily understood by humans. They often use a goal function that describes the usefulness of states. The task of the system is then to maximize this objective function, that is, to determine the state that has the maximum usefulness or that, in case of uncertainties, maximizes the future expected reward. If, for example, one chooses the cleanliness of the work surface minus the costs for the executed actions as the objective function for a cleaning robot, then in the ideal case this leads to the robot selecting the optimal actions in order to keep the work surface as clean as possible. This already shows the strength of the approach to generate rational behavior compared to the approach to generate human behavior. A robot striving for rational behavior can simply become more effective than one that merely imitates human behavior, because humans, unfortunately, do not show the optimal behavior in all cases. The disadvantage lies in the fact that the interpretation of the representations or structures learned by the system typically is not easy, which makes verification difficult. Especially in the case of safety-relevant systems, it is often necessary to provide evidence of the safety of, for example, the control software. However, this can be very difficult and generally even impossible to do analytically, so one has to rely on statistics. In the case of self-driving cars, for example, one has to resort to extensive field tests in order to be able to prove the required safety of the systems.
Historically, the term AI dates back to 1956, when at a summer workshop called the Dartmouth Summer Research Project on Artificial Intelligence,Footnote 3 renowned scientists met in the state of New Hampshire, USA, to discuss AI. The basic idea was that any aspect of learning or other properties of intelligence can be described so precisely that machines can be used to simulate them. In addition, the participants wanted to discuss how to get computers to use language and abstract concepts, or simply improve their own behavior. This meeting is still considered today to have been extremely successful and has led to a large number of activities in the field of AI. For example, in the 1980s, there was a remarkable upswing in AI in which questions of knowledge representation and knowledge processing played an important role. In this context, for example, expert systems became popular.Footnote 4 Such systems used a large corpus of knowledge, represented for example in terms of facts and rules, to draw conclusions and provide solutions to problems. Although there were initially quite promising successes with expert systems, these successes then waned quite a bit, leading to a so-called demystification of AI and ushering in the AI winter.Footnote 5 It was not until the 1990s when mathematical and probabilistic methods increasingly took hold and a new upswing could be recorded. A prominent representative of this group of methods is Bayesian networks.Footnote 6 The systems resulting from this technique were significantly more robust than those based on symbolic techniques. This period also started the advent of machine learning techniques based on probabilistic and mathematical concepts. For example, support vector machinesFootnote 7 revolutionized machine learning. Until a few years ago, they were considered one of the best performing approaches to classification problems. This radiated to other areas, such as pattern recognition and image processing. Face recognition and also speech recognition algorithms found their way into products we use in our daily lives, such as cameras or even cell phones. Cameras can automatically recognize faces and cell phones can be controlled by speech. These methods have been applied in automobiles, for example when components can be controlled by speech. However, there are also fundamental results from the early days of AI that have a substantial influence on today’s products. These include, for example, the ability of navigation systems to plan the shortest possible routesFootnote 8 and navigate us effectively to our destination based on given maps. Incidentally, the same approaches play a significant role in computer games, especially when it comes to simulating intelligent systems that can effectively navigate the virtual environment. At the same time, there was also a paradigm shift in robotics. The probabilistic methods had a significant impact, especially on the navigation of mobile robots, and today, thanks to this development, it is well understood how to build mobile systems that move autonomously in their environment. This currently has an important influence on various areas, such as self-driving cars or transport systems in logistics, where extensive innovations can be expected in the coming years.
For a few years now, the areas of machine learning and robotics have been considered particularly promising, based especially on the key fields of big data, deep learning, and autonomous navigation and manipulation.
II. Machine Learning
Machine learning typically involves developing algorithms to improve the performance of procedures based on data or examples and without explicit programming.Footnote 9 One of the predominant applications of machine learning is that of classification. Here the system is presented with a set of examples and their corresponding classes. The system must now learn a function that maps the properties or attributes of the examples to the classes with the goal of minimizing the classification error. Of course, one could simply memorize all the examples, which would automatically minimize the classification error, but such a procedure would require a lot of space and, moreover, would not generalize to examples not seen before. In principle, such an approach can only guess. The goal of machine learning is rather to learn a compact function that performs well on the given data and also generalizes well to unseen examples. In the context of classification, examples include decision trees, random forests, a generalization thereof, support vector machines, or boosting. These approaches are considered supervised learning because the learner is always given examples including their classes.
Another popular supervised learning problem is regression. Here, the system is given a set of points of a function with the task of determining a function that approximates the given points as well as possible. Again, one is interested in functions that are as compact as possible and minimize the approximation error. In addition, there is also unsupervised learning, where one searches for a function that explains the given data as well as possible. A typical unsupervised learning problem is clustering, where one seeks centers for a set of points in the plane such that the sum of the squared distances of all points from their nearest center is minimized.
Supervised learning problems occur very frequently in practice. For example, consider the face classification problem. Here, for a face found in an image, the problem is to assign the name of the person. Such data is available in large masses to companies that provide social networks, such as Facebook. Users can not only mark faces on Facebook but also assign the names of their friends to these marked faces. In this way, a huge data set of images is created in which faces are marked and labelled. With this, supervised learning can now be used to (a) identify faces in images and (b) assign the identified faces to people. Because the classifiers generalize well, they can subsequently be applied to faces that have not been seen before, and nowadays they produce surprisingly good results.
In fact, the acquisition of large corpora of annotated data is one of the main problems in the context of big data and deep learning. Major internet companies are making large-scale efforts to obtain massive corpora of annotated data. So-called CAPTCHAs (Completely Automated Public Turing tests to tell Computers and Humans Apart) represent an example of this.Footnote 10 Almost everyone who has tried to create a user account on the Internet has encountered such CAPTCHAs. Typically, service providers want to ensure that user accounts are not registered en masse by computer programs. Therefore, the applicants are provided with images of distorted text that can hardly be recognized by scanners and optical character recognition. Because the images are now difficult to recognize by programs, they are ideal for distinguishing humans from computer programs or bots. Once humans have annotated the images, learning techniques can again be used to solve these hard problems and further improve optical character recognition. At the same time, this ensures that computer programs are always presented with the hardest problems that even the best methods cannot yet solve.
1. Key Technology Big Data
In 2018, the total amount of storage globally available was estimated to be about 20 zettabytes (1 zettabyte = 1021 byte = 109 terabytes).Footnote 11 Other sources estimate internet data transfer at approximately 26 terabytes per second.Footnote 12 Of course, predictions are always subject to large uncertainties. Estimates from the International Data Corporation assume that the total volume will grow to 160 zettabytes by 2025, an estimated tenfold increase. Other sources predict an annual doubling. The number of pages of the World Wide Web indexed by search engines is enormous. Google announced almost ten years ago that they have indexed 1012 different URLs (uniform resource locators, reference to a resource on the World Wide Web).Footnote 13 Even though these figures are partly based on estimates and should therefore be treated with caution, especially with regard to predictions for the future, they make it clear that huge amounts of data are available on the World Wide Web. This creates an enormous potential of data that is available not only to people but also to service providers such as Apple, Facebook, Amazon, Google, and many others, in order to offer services that are helpful to people in other contexts using appropriate AI methods. One of the main problems here, however, is the provision of data. Data is not helpful in all cases. As a rule, it only becomes so when people annotate it and assign a meaning to it. By using learning techniques, images that have not been seen before can be annotated. The techniques for doing so will be presented in the following sections. We will also discuss which methods can be used to generate this annotated data.
2. Key Technology Deep Learning
Deep learningFootnote 14 is a technique that emerged a few years ago and that can learn from massive amounts of data to provide effective solutions to a variety of machine learning problems. One of the most popular approaches is the so-called deep neural networks. They are based on the neural networks whose introduction dates back to Warren McCulloch and Walter Pitts in 1943.Footnote 15 At that time, they tried to reproduce the functioning of neurons of the brain by using electronic circuits, which led to the artificial neural networks. The basic idea was to build a network consisting of interconnected layers of nodes. Here, the bottom layer is considered the input layer, and the top layer is considered the output layer. Each node now executes a simple computational rule, such as a simple threshold decision. The outputs of each node in a layer are then passed to the nodes in the next layer using weighted sums. These networks were already extremely successful and produced impressive results, for example, in the field of optical character recognition. However, even then there were already pioneering successes from today’s point of view, for example in the No Hands Across America project,Footnote 16 in which a minivan navigated to a large extent autonomously and controlled by a neural network from the east coast to the west coast of the United States. Until the mid-80s of the last century, artificial neural networks played a significant role in machine learning, until they were eventually replaced by probabilistic methods and, for example, Bayesian networks,Footnote 17 support vector machines,Footnote 18 or Gaussian processes.Footnote 19 These techniques have dominated machine learning for more than a decade and have also led to numerous applications, for example in image processing, speech recognition, or even human–machine interaction. However, they have recently been superseded by the deep neural networks, which are characterized by having a massive number of layers that can be effectively trained on modern hardware, such as graphics cards. These deep networks learn representations of the data at different levels of abstraction at each layer. Particularly in conjunction with large data sets (big data), these networks can use efficient algorithms such as backpropagation to optimize the parameters in a single layer based on the previous layer to identify structures in data. Deep neural networks have led to tremendous successes, for example in image, video, or speech processing. But they have also been used with great success in other tasks, such as in the context of object recognition or deep data interpretation. The deep neural networks could impressively demonstrate their ability in their application within AlphaGo, a computer program that defeated Lee Sidol, one of the best Go players in the world.Footnote 20 This is noteworthy because until a few years ago it was considered unlikely that Go programs would be able to play at such a level in the foreseeable future.
III. Robotics
Robotics is a scientific discipline that deals with the design of physical agents (robotic systems) that effectively perform tasks in the real world. They can thus be regarded as physical AI systems. Application fields of robotics are manifold. In addition to classical topics such as motion planning for robot manipulators, other areas of robotics have gained increasing interest in the recent past, for example, position estimation, simultaneous localization and mapping, and navigation. The latter is particularly relevant for transportation tasks. If we now combine manipulators with navigating platforms, we obtain mobile manipulation systems that can play a substantial role in the future and offer various services to their users. For example, production processes can become more effective and also can be reconfigured flexibly with these robots. To build such systems, various key competencies are required, some of which are already available or are at a quality level sufficient for a production environment, which has significantly increased the attractiveness of this technology in recent years.
1. Key Technology Navigation
Mobile robots must be able to navigate their environments effectively in order to perform various tasks effectively. Consider, for example, a robotic vacuum cleaner or a robotic lawnmower. Most of today’s systems do their work by essentially navigating randomly. As a result, as time progresses, the probability increases that the robot will have approached every point in its vicinity once so that the task is never guaranteed but very likely to be completed if one waits for a sufficiently long time. Obviously, such an approach is not optimal in the context of transport robots that are supposed to move an object from the pickup position to the destination as quickly as possible. Several components are needed to execute such a task as effectively as possible. First, the robot must have a path planning component that allows it to get from its current position to the destination point in the shortest possible path. Methods for this come from AI and are based, for example, on the well-known A* algorithm for the effective computation of shortest paths.Footnote 21 For path planning, robotic systems typically use maps, either directly in the form of roadmaps or by subdividing the environment of the robot into free and occupied space in order to derive roadmaps from this representation. However, a robot can only assume under very strong restrictions that the once planned path is actually free of obstacles. This is, in particular, the case if the robot operates in a dynamic environment, for example in one used by humans. In dynamic, real-world environments the robot has to face situations in which doors are closed, that there are obstacles on the planned path or that the environment has changed and the given map is, therefore, no longer valid. One of the most popular approaches to attack this problem is to equip the robot with sensors that allow it to measure the distance to obstacles and thus avoid obstacles. Additionally, an approach is used that avoids collisions and makes dynamic adjustments to the previously planned path. In order to navigate along a planned path, the robot must actually be able to accurately determine its position on the map and on the planned path (or distance from it). For this purpose, current navigation systems for robots use special algorithms based on probabilistic principles,Footnote 22 such as the Kalman filterFootnote 23 or the particle filter algorithm.Footnote 24 Both approaches and their variants have been shown to be extremely robust for determining a probability distribution about the position of the vehicle based on the distances to obstacles determined by the distance sensor and the given obstacle map. Given this distribution, the robot can choose its most likely position to make its navigation decisions. The majority of autonomously navigating robots that are not guided by induction loops, optical markers, or lines utilize probabilistic approaches for robot localization. A basic requirement for the components discussed thus far is the existence of a map. But how can a robot obtain such an obstacle map? In principle, there are two possible solutions for this. First, the user can measure the environment and use it to create a map with the exact positions of all objects in the robot’s workspace. This map can then be used to calculate the position of the vehicle or to calculate paths in the environment. The alternative is to use a so-called SLAM (Simultaneous Localization and Mapping)Footnote 25 method. Here, the robot is steered through its environment and, based on the data gathered throughout this process, automatically computes the map. Incidentally, this SLAM technique is also known in photogrammetry where it is used for generating maps based on measurements.Footnote 26 These four components: path planning, collision avoidance and replanning, localization, and SLAM for map generation are key to today’s navigation robots and also self-driving cars.
2. Key Technology Autonomous Manipulation
Manipulation has been successfully used in production processes in the past. The majority of these robots had fixed programmed actions and, furthermore, a cage around them to prevent humans from entering the action spaces of the robots. The future, however, lies in robots that are able to robustly grasp arbitrary objects even from cluttered scenes and that are intrinsically safe and cannot harm people. In particular, the development of lightweight systemsFootnote 27 will be a key enabler for human–robot collaboration. On the other hand, this requires novel approaches to robust manipulation. In this context, again, AI technology based on deep learning has played a key role over the past years and is envisioned to provide innovative solutions for the future. Recently, researchers presented an approach to apply deep learning to robustly grasp objects from cluttered scenes.Footnote 28 Both approaches will enable us in the future to build robots that coexist with humans, learn from them, and improve over time.
IV. Current and Future Fields of Application and Challenges
As already indicated, AI is currently more and more becoming a part of our daily lives. This affects both our personal and professional lives. Important transporters of AI technology are smartphones, as numerous functions on them are based on AI. For example, we can already control them by voice, they recognize faces in pictures, they automatically store important information for us, such as where our car is parked, and they play music we like after analyzing our music library or learning what we like from our ratings of music tracks. By analyzing these preferences in conjunction with those of other users, the predictions of tracks we like get better and better. This can, of course, be applied to other activities, such as shopping, where shopping platforms suggest possible products we might be interested in. This has long been known from search engines, which try to present us with answers that correspond as closely as possible to the Web pages for which we are actually looking. In robotics, the current key areas are logistics and flexible production (Industry 4.0). To remain competitive, companies must continue to optimize production processes. Here, mobile robots and flexible manipulation systems that can cooperate with humans will play a decisive role. This will result in significantly more flexible production processes, which will be of enormous importance for all countries with large manufacturing sectors. However, robots are also envisioned to perform various tasks in our homes.
By 2030, AI will penetrate further areas: Not only will we see robots performing ever more demanding tasks in production, but also AI techniques will find their way into areas performed by people with highly qualified training. For example, there was a paper in Nature that presented a system that could diagnose skin cancer based on an image of the skin taken with a cell phone.Footnote 29 The interesting aspect of this work is that the authors were actually able to achieve the detection rate of dermatologists with their deep neural networks-based system. This clearly indicates that there is enormous potential in AI to further optimize processes that require a high level of expertise.
With the increasing number of applications of systems relying on AI technology, there is also a growing need for the responsibility or the responsible governance of such systems. In particular, when they can impose risks for individuals, for example in the context of service robots that collaborate with humans or self-driving cars that co-exist with human traffic participants, where mistakes of the physical agent might substantially harm a person, the demands for systems whose behavior can be explained to, or understood by, humans are high. Even in the context of risk-free applications, there can be such a demand, for example, to better identify biases in recommender systems. A further relevant issue is that of privacy. In particular, AI systems based on machine learning require a large amount of data, which imposes the question of how these systems can be trained so that the privacy of the users can be maintained while at the same time providing all the necessary benefits. A further interesting tool for advancing the capabilities of such systems is fleet learning, learning in which all systems jointly learn from their users how to perform specific tasks. In this context, the question arises of how to guarantee that no system is taught inappropriate or even dangerous behavior. How can we build such systems so that they conform with values, norms, and regulations? Answers to these questions are by themselves challenging research problems and many chapters in this book address them.
As the field of machine learning advances, AI systems are becoming more and more useful in a number of domains, in particular due to their increasing ability to generalise beyond their training data. Our focus in this chapter is on understanding the different possibilities for the deployment of highly capable and general systems which we may build in the future. We introduce a framework for the deployment of AI which focuses on two ways for humans to interact with AI systems: delegation and supervision. This framework provides a new lens through which to view both the relationship between humans and AIs, and the relationship between the training and deployment of machine learning systems.
I. AIs As Tools, Agents, or Delegates
The last decade has seen dramatic progress in Artificial Intelligence (AI), in particular due to advances in deep learning and reinforcement learning. The increasingly impactful capabilities of our AI systems raise important questions about what future AIs might look like and how we might interact with them. In one sense, AI can be considered a particularly sophisticated type of software. Indeed, the line between AI and other software is very blurry: many software products rely on algorithms which fell under the remit of AI when they were developed, but are no longer typically described as AI.Footnote 1 Prominent examples include search engines like Google and image-processing tools like optical character recognition. Thus, when thinking about future AI systems, one natural approach is to picture us interacting with them similarly to how we interact with software programs: as tools which we will use to perform specific tasks, based on predefined affordances, via specially-designed interfaces.
Let us call this the ‘tool paradigm’ for AI. Although we will undoubtedly continue to develop some AIs which fit under this paradigm, compelling arguments have been made that other AIs will fall outside it – in particular, AIs able to flexibly interact with the real world to perform a wide range of tasks, displaying general rather than narrow intelligence. The example of humans shows that cognitive skills gained in one domain can be useful in a wide range of other domains; it is difficult to argue that the same cannot be true for AIs, especially given the similarities between human brains and deep neural networks. Although no generally intelligent AIs exist today, and some AI researchers are skeptical about the prospects for building them, most expect it to be possible within this century.Footnote 2 However, it does not require particularly confident views on the timelines involved to see value in starting to prepare for the development of artificial general intelligence (AGI) already.
Why won’t AGIs fit naturally into the tool paradigm? There are two core reasons: flexibility and autonomy. Tools are built with a certain set of affordances, which allow a user to perform specific tasks with them.Footnote 3 For example, software programs provide interfaces for humans to interact with, where different elements of the interface correspond to different functionalities. However, predefined interfaces cannot adequately capture the wide range of tasks that humans are, and AGIs will be, capable of performing. When working with other humans, we solve this problem by using natural language to specify tasks in an expressive and flexible way; we should expect that these and other useful properties will ensure that natural language is a key means of interacting with AGIs. Indeed, AI assistants such as Siri and Alexa are already rapidly moving in this direction.
A second difference between using tools and working with humans: when we ask a human to perform a complex task for us, we don’t need to directly specify each possible course of action. Instead, they will often be able to make a range of decisions and react to changing circumstances based on their own judgements. We should expect that, in order to carry out complex tasks like running a company, AGIs will also need to be able to act autonomously over significant periods of time. In such cases, it seems inaccurate to describe them as tools being directly used by humans, because the humans involved may know very little about the specific actions the AGI is taking.
In an extreme case, we can imagine AGIs which possess ingrained goals which they pursue autonomously over arbitrary lengths of time. Let’s call this the full autonomy paradigm. Such systems have been discussed extensively by Nick Bostrom and Eliezer Yudkowsky.Footnote 4 Stuart Russell argues that they are the logical conclusion of extrapolating the current aims and methods of machine learning.Footnote 5 Under this paradigm, AIs would acquire goals during their training process which they then pursue throughout deployment. Those goals might be related to, or influenced by, human preferences and values, but could be pursued without humans necessarily being in control or having veto power.
The prospect of creating another type of entity which independently pursues goals in a similar way to humans raises a host of moral, legal, and safety questions, and may have irreversible effects – because once created, autonomous AIs with broad goals will have incentives to influence human decision-making towards outcomes more favourable to their goals. In particular, concerns have been raised about the difficulty of ensuring that goals acquired by AIs during training are desirable ones from a human perspective. Why might AGIs nevertheless be built with this level of autonomy? The main argument towards this conclusion is that increasing AI autonomy will be a source of competitive economic or political advantage, especially if an AGI race occurs.Footnote 6 Once an AI’s strategic decision-making abilities exceed those of humans, then the ability to operate independently, without needing to consult humans and wait for their decisions, would give it a speed advantage over more closely-supervised competitors. This phenomenon has already been observed in high-frequency trading in financial markets – albeit to a limited extent, because trading algorithms can only carry out a narrow range of predefined actions.
Authors who have raised these concerns have primarily suggested that they be solved by developing better techniques for building the right autonomous AIs. However, we should not consider it a foregone conclusion that we will build fully autonomous AIs at all. As Stephen Cave and Sean ÓhÉigeartaigh point out, AI races are driven in part by self-fulfilling narratives – meaning that one way of reducing their likelihood is to provide alternative narratives which don’t involve a race to fully autonomous AGI.Footnote 7 In this chapter we highlight and explore an alternative which lies between the tool paradigm and the full autonomy paradigm, which we call the supervised delegation paradigm. The core idea is that we should aim to build AIs which can perform tasks and make decisions on our behalf upon request, but which lack persistent goals of their own outside the scope of explicit delegation. Like autonomous AIs, delegate AIs would be able to infer human beliefs and preferences, then flexibly make and implement decisions without human intervention; but like tool AIs, they would lack agency when they have not been deployed by humans. We call systems whose motivations function in this way aligned delegates (as discussed further in the next section).
The concept of delegation has appeared in discussions of agent-based systems going back decades,Footnote 8 and is closely related to Bostrom’s concept of ‘genie AI’.Footnote 9 Another related concept is the AI assistance paradigm advocated by Stuart Russell, which also focuses on building AIs that pursue human goals rather than their own goals.Footnote 10 However, Russell’s conception of assistant AIs is much broader in scope than delegate AIs as we have defined them, as we discuss in the next section. More recently, delegation was a core element of Andrew Critch and David Krueger’s ARCHES framework, which highlights the importance of helping multiple humans safely delegate tasks to multiple AIs.Footnote 11
While most of the preceding works were motivated by concern about the difficulty of alignment, they spend relatively little time explaining the specific problems involved in aligning machine learning systems, and how proposed solutions address them. The main contribution of this chapter is to provide a clearer statement of the properties which we should aim to build into AI delegates, the challenges which we should expect, and the techniques which might allow us to overcome them, in the context of modern machine learning (and more specifically deep reinforcement learning). A particular focus is the importance of having large amounts of data which specify desirable behaviour – or, in more poetic terms, the ‘unreasonable effectiveness of data’.Footnote 12 This is where the supervised aspect of supervised delegation comes in: we argue that, in order for AI delegates to remain trustworthy, it will be necessary to continuously monitor and evaluate their behaviour. We discuss ways in which the difficulties of doing so give rise to a tradeoff between safety and autonomy. We conclude with a discussion of how the goal of alignment can be a focal point for cooperation, rather than competition, between groups involved with AI development.
II. Aligned Delegates
What does it mean for an AI to be aligned with a human? The definition which we will use here comes from Paul Christiano: an AI is intent aligned with a human if the AI is trying to do what the human wants it to do.Footnote 13 To be clear, this does not require that the AI is correct about what the human wants it to do, nor that it succeeds – both of which will be affected by the difficulty of the task and the AI’s capabilities. The concept of intent alignment (henceforth just ‘alignment’) instead attempts to describe an AI’s motivations in a way that’s largely separable from its capabilities.
Having said that, the definition still assumes a certain baseline level of capabilities. As defined above, alignment is a property only applicable to AIs with sufficiently sophisticated motivational systems that they can be accurately described as trying to achieve things. It also requires that they possess sufficiently advanced theories of mind to be able to ascribe desires and intentions to humans, and reasonable levels of coherence over time. In practice, because so much of human communication happens via natural language, it will also require sufficient language skills to infer humans’ intentions from their speech. Opinions differ on how difficult it is to meet these criteria – some consider it appropriate to take an ‘intentional stance’ towards a wide range of systems, including simple animals, whereas others have more stringent requirements for ascribing intentionality and theory of mind.Footnote 14 We need not take a position on these debates, except to hold that sufficiently advanced AGIs could meet each of these criteria.
Another complication comes from the ambiguity of ‘what the human wants’. Iason Gabriel argues that ‘there are significant differences between AI that aligns with instructions, intentions, revealed preferences, ideal preferences, interests and values’; Christiano’s definition of alignment doesn’t pin down which of these we should focus on.Footnote 15 Alignment with the ideal preferences and values of fully-informed versions of ourselves (also known as ‘ambitious alignment’) has been the primary approach discussed in the context of fully autonomous AI. Even Russell’s assistant AIs are intended to ‘maximise the realisation of human preferences’ – where he is specifically referring to preferences that are ‘all-encompassing: they cover everything you might care about, arbitrarily far into the future’.Footnote 16
Yet it’s not clear whether this level of ambitious alignment is either feasible or desirable. In terms of feasibility, focusing on long timeframes exacerbates many of the problems we discuss in later sections. And in terms of desirability, ambitious alignment implies that a human is no longer an authoritative source for what an AI aligned with that human should aim to do. An AI aligned with a human’s revealed preferences, ideal preferences, interests, or values might believe that it understands them better than the human does, which could lead to that AI hiding information from the human or disobeying explicit instructions. Because we are still very far from any holistic theory of human preferences or values, we should be wary of attempts to design AIs which take actions even when their human principals explicitly instruct them not to; let us call this the principle of deference. (Note that the principle is formulated in an asymmetric way – it seems plausible that aligned AIs should sometimes avoid taking actions even when instructed to do so, in particular illegal or unethical actions.)
For our purposes, then, we shall define a delegate AI as aligned with a human principal if it tries to do only what that human intends it to do, where the human’s intentions are interpreted to be within the scope of tasks the AI has been delegated. What counts as a delegated task depends on what the principal has said to the AI – making natural language an essential element of the supervised delegation paradigm. This contrasts with both the tool paradigm (in which many AIs will not be general enough to understand linguistic instructions) and the full autonomy paradigm (in which language is merely considered one of many information channels which help AIs understand how to pursue their underlying goals).
Defining delegation in terms of speech acts does not, however, imply that all relevant information needs to be stated explicitly. Although early philosophers of language focused heavily on the explicit content of language, more recent approaches have emphasised the importance of a pragmatic focus on speaker intentions and wider context in addition to the literal meanings of the words spoken.Footnote 17 From a pragmatic perspective, full linguistic competence includes the ability to understand the (unspoken) implications of a statement, as well as the ability to interpret imprecise or metaphorical claims in the intended way. Aligned AI delegates should use this type of language understanding in order to interpret the ‘scope’ of tasks in terms of the pragmatics and context of the instructions given, in the same way that humans do when following instructions. An AI with goals which extend outside that scope, or which don’t match its instructions, would count as misaligned.
We should be clear that aiming to build aligned delegates with the properties described above will likely involve making some tradeoffs against desirable aspects of autonomy. For example, an aligned delegate would not take actions which are beneficial for its user that are outside the scope of what it has been asked to do; nor will it actively prevent its user from making a series of bad choices. We consider these to be features, though, rather than bugs – they allow us to draw a boundary before reaching full autonomy, with the aim of preventing a gradual slide into building fully autonomous systems before we have a thorough understanding of the costs, benefits, and risks involved. The clearer such boundaries are, the easier it will be to train AIs with corresponding motivations (as we discuss in the next section).
A final (but crucial) consideration is that alignment is a two-place predicate: an AI cannot just be aligned simpliciter, but rather must be aligned with a particular principal – and indeed could be aligned with different principals in different ways. For instance, when AI developers construct an AI, they would like it to obey the instructions given to it by the end user, but only within the scope of whatever terms and conditions have been placed on it. From the perspective of a government, another limitation is desirable: AI should ideally be aligned to their end users only within the scope of legal behaviour. The questions of who AIs should be aligned with, and who should be held responsible for their behaviour, are fundamentally questions of politics and governance rather than technical questions. However, technical advances will affect the landscape of possibilities in important ways. Particularly noteworthy is the effect of AI delegates performing impactful political tasks – such as negotiation, advocacy, or delegation of their own – on behalf of their human principals. The increased complexity of resulting AI governance problems may place stricter requirements on technical approaches to achieving alignment.Footnote 18
III. The Necessity of Human Supervision
So far we have talked about desirable properties of alignment without any consideration of how to achieve those desiderata. Unfortunately, a growing number of researchers have raised concerns that current machine learning techniques are inadequate for ensuring alignment of AGIs. Research in this area focuses on two core problems. The first is the problem of outer alignment: the difficulty in designing reward functions for reinforcement learning agents which incentivise desirable behaviour while penalising undesirable behaviour.Footnote 19 Victoria Krakovna et al catalogue many examples of specification gaming in which agents find unexpected ways to score highly even in relatively simple environments, most due to mistakes in how the reward function was specified.Footnote 20 As we train agents in increasingly complex and open-ended environments, designing ungameable reward functions will become much more difficult.Footnote 21
One major approach to addressing the problems with explicit reward functions involves generating rewards based on human data – known as reward learning. Early work on reward learning focused on deriving reward functions from human demonstrations – a process known as inverse reinforcement learning.Footnote 22 However, this requires humans themselves to be able to perform the task to a reasonable level in order to provide demonstrations. An alternative approach which avoids this limitation involves inferring reward functions from human evaluations of AI behaviour. This approach, known as reward modelling, has been used to train AIs to perform tasks which humans cannot demonstrate well, such as controlling a (simulated) robot body to do a backflip.Footnote 23
In most existing examples of reward learning, reward functions are learned individually for each task of interest – an approach which doesn’t scale to systems which generalise to new tasks after deployment. However, a growing body of work on interacting with reinforcement learning agents using natural language has been increasingly successful in training AIs to generalise to novel instructions.Footnote 24 This fits well with the vision of aligned delegation described in the previous section, in which specification of tasks for AIs involves two steps: first training AIs to have aligned motivations, and then using verbal instructions to delegate them specific tasks. The hope is that if AIs are rewarded for following a wide range of instructions in a wide range of situations, then they will naturally acquire the motivation to follow human instructions in general, including novel instructions in novel environments.
However, this hope is challenged by a second concern. The problem of inner alignment is that even if we correctly specify the reward function used during training, the resulting policy may not possess the goal described by that reward function. In particular, it may learn to pursue proxy goals which are correlated with reward during most of the training period, but which eventually diverge (either during later stages of training, or during deployment).Footnote 25 This possibility is analogous to how humans learned to care directly about food, survival, sex, and so on – proxies which were strongly correlated with genetic fitness in our ancestral environment, but are much less so today.Footnote 26 As an illustration of how inner misalignment might arise in the context of machine learning, consider training a policy to follow human instructions in a virtual environment containing many incapacitating traps. If it is rewarded every time it successfully follows an instruction, then it will learn to avoid becoming incapacitated, as that usually prevents it from completing its assigned task. This is consistent with the policy being aligned, if the policy only cares about surviving the traps as a means to complete its assigned task – in other words, as an instrumental goal. However, if policies which care about survival only as an instrumental goal receive (nearly) the same reward as policies which care about survival for its own sake (as a final goal) then we cannot guarantee that the training process will find one in the former category rather than the latter.
Now, survival is just one example of a proxy goal that might lead to inner misalignment; and it will not be relevant in all training environments. But training environments which are sufficiently complex to give rise to AGI will need to capture at least some of the challenges of the real world – imperfect information, resource limitations, and so on. If solving these challenges is highly correlated with receiving rewards during training, then how can we ensure that policies only learn to care about solving those challenges for instrumental purposes, within the bounds of delegated tasks? The most straightforward approach is to broaden the range of training data used, thereby reducing the correlations between proxy goals and the intended goal. For example, in the environment discussed in the previous paragraph, instructing policies to deliberately walk into traps (and rewarding them for doing so) would make survival less correlated with reward, thereby penalising policies which pursue survival for its own sake.
In practice, though, when talking about training artificial general intelligences to perform a wide range of tasks, we should expect that the training data will encode many incentives which are hard to anticipate in advance. Language models such as GPT-3 are already being used in a wide range of surprising applications, from playing chess (using text interactions only) to generating text adventure games.Footnote 27 It will be difficult for AI developers to monitor AI behaviour across many domains, and then design rewards which steer those AIs towards intended behaviour. This difficulty is exacerbated by the fact that modern machine learning techniques are incredibly data-hungry: training agents to perform well in difficult games can take billions of steps. If the default data sources available give rise to inner or outer alignment problems, then the amount of additional supervision required to correct these problems may be infeasible for developers to collect directly. So, how can we obtain enough data to usefully think about alignment failures in a wide range of circumstances, to address the outer and inner alignment problems?
Our suggestion is that this gap in supervision can be filled by end users. Instead of thinking of AI development as a training process followed by a deployment process, we should think of it as an ongoing cycle in which users feed back evaluations which are then used to help align future AIs. In its simplest form, this might involve users identifying inconsistencies or omissions in an AI’s statements, or ways in which it misunderstood the user’s intentions, or even just occasions when it took actions without having received human instructions. In order to further constrain an AI’s autonomy, the AI can also be penalised for behaviour which was desirable, but beyond the scope of the task it was delegated to perform. This form of evaluation is much easier than trying to evaluate the long-term consequences of an AI’s actions; yet it still pushes back against the underlying pressure towards convergent instrumental goals and greater autonomy that we described above.
Of course, user data is already collected by many different groups for many different purposes. Prominent examples include scraping text from Reddit, or videos from YouTube, in order to train large self-supervised machine learning models. However, these corpora contain many examples of behaviour we wouldn’t like AIs to imitate – as seen in GPT-3’s regurgitation of stereotypes and biases found in its training data.Footnote 28 In other cases, evaluations are inferred from user behaviour: likes on a social media post, or clicks on a search result, can be interpreted as positive feedback. Yet these types of metrics already have serious limitations: there are many motivations driving user engagement, not all of which should be interpreted as positive feedback. As interactions with AI become much more freeform and wide-ranging, inferred correlations will become even less reliable, compared with asking users to evaluate AI alignment directly. So even if users only perform explicit evaluations of a small fraction of AI behaviour, this could provide much more information about their alignment than any other sources of data currently available. And, unlike other data sources, user evaluations could flexibly match the distributions of tasks on which AIs are actually deployed in the real world, and respond to new AI behaviour very quickly.Footnote 29
IV. Beyond Human Supervision
Unfortunately, there are a number of reasons to expect that even widespread use of human evaluation will not be sufficient for reliable supervision in the long term. The core problem is that the more sophisticated an AI’s capabilities are, the harder it is to identify whether it is behaving as intended or not. In some narrow domains like chess and Go, experts already struggle to evaluate the quality of AI moves, and to tell the difference between blunders and strokes of brilliance. The much greater complexity of the real world will make it even harder to identify all the consequences of decisions made by AIs, especially in domains where they make decisions far faster and generate much more data than humans can keep up with.
Particularly worrying is the possibility of AIs developing deceptive behaviour with the aim of manipulating humans into giving better feedback. The most notable example of this came from reward modelling experiments in which a human rewarded an AI for grasping a ball with a robotic claw.Footnote 30 Instead of completing the intended task, the AI learned to move the claw into a position between the camera and the ball, thus appearing to grasp the ball without the difficulty of actually doing so. As AIs develop a better understanding of human psychology and the real-world context in which they’re being trained, manipulative strategies like this could become much more complex and much harder to detect. They would also not necessarily be limited to affecting observations sent directly to humans, but might also attempt to modify their reward signal using any other mechanisms they can gain access to.
The possibility of manipulation is not an incidental problem, but rather a core difficulty baked into the use of reinforcement learning in the real world. As AI pioneer Stuart Russell puts it:
The formal model of reinforcement learning assumes that the reward signal reaches the agent from outside the environment; but [in fact] the human and robot are part of the same environment, and the robot can maximize its reward by modifying the human to provide a maximal reward signal at all times. … [This] indicates a fundamental flaw in the standard formulation of RL.Footnote 31
In other words, AIs are trained to score well on their reward functions by taking actions to influence the environment around them, and human supervisors are a part of their environment which has a significant effect on the reward they receive, so we should expect that by default AIs will learn to influence their human supervisors. This can be mitigated if supervisors heavily penalise attempted manipulation when they spot it – but this still leaves an incentive for manipulation which can’t be easily detected. As AIs come to surpass human abilities on complex real-world tasks, preventing them from learning manipulative strategies will become increasingly difficult – especially if AI capabilities advance rapidly, so that users and researchers have little time to notice and respond to the problem.
How might we prevent this, if detecting manipulation or other undesirable behaviour eventually requires a higher quality and quantity of evaluation data than unaided humans can produce? The main mechanisms which have been proposed for expanding the quality/quantity frontier of supervision involve relying on AI systems themselves to help us supervise other AIs. When considering this possibility, we can reuse two of the categories discussed in the first section: we can either have AI-based supervision tools, or else we can delegate the process of supervision to another AI (which we shall call recursive supervision, as it involves an AI delegate supervising another AI delegate, which might then supervise another AI delegate, which…).
One example of an AI-based supervision tool is a reward model which learns to imitate human evaluations of AI behaviour. Reinforcement learning agents whose training is too lengthy for humans to supervise directly (e.g. involving billions of steps) can then be supervised primarily by reward models instead. Early work on reward models demonstrated a surprising level of data efficiency: reward models can greatly amplify a given amount of human feedback.Footnote 32 However, the results of these experiments also highlighted the importance of continual feedback – when humans stopped providing new data, agents eventually found undesirable behaviours which nevertheless made the reward models output high scores.Footnote 33 So reward models are likely to rely on humans continually evaluating AI behaviour as it expands into new domains.
Another important category of supervision tool is interpretability tools, which aim to explain the mechanisms by which a system decides how to act. Although deep neural networks are generally very opaque to mechanistic explanation, there has been significant progress over the last few years in identifying how groups of artificial neurons (and even individual neurons) contribute to the overall output.Footnote 34 One long-term goal of this research is to ensure that AIs will honestly explain the reasoning that led to their actions and their future intentions. This would help address the inner alignment problems described above, because agents could be penalised for acting according to undesirable motivations even when their behaviour is indistinguishable from the intended behaviour. However, existing techniques are still far from being able to identify deceptiveness (or other comparably abstract traits) in sophisticated models.
Recursive supervision is currently also in a speculative position, but some promising strategies have been identified. A notable example is Geoffrey Irving, Paul Christiano, and Dario Amodei’s Debate technique, in which two AIs are trained to give arguments for opposing conclusions, with a human judging which arguments are more persuasive.Footnote 35 Because the rewards given for winning the debate are zero-sum, the resulting competitive dynamic should in theory lead each AI to converge towards presenting compelling arguments which are hard to rebut – analogous to how AIs trained via self-play on zero-sum games converge to winning strategies. However, two bottlenecks exist: the ease with which debaters can identify flaws in deceptive arguments, and the accuracy with which humans can judge allegations of deception. Several strategies have been proposed to make judging easier – for example, incorporating cross-examination of debaters, or real-world tests of claims made during the debate – but much remains to be done in fleshing out and testing Debate and other forms of recursive supervision.
To some extent, recursive supervision will also arise naturally when multiple AIs are deployed in real-world scenarios. For example, if one self-driving car is driving erratically, then it’s useful for others around it to notice and track that. Similarly, if one trading AI is taking extreme positions that move the market considerably, then it’s natural for other trading AIs to try to identify what’s happening and why. This information could just be used to flag the culprit for further investigation – but it could also be used as a supervision signal for further training, if shared with the relevant AI developers. In the next section we discuss the incentives which might lead different groups to share such information, or to cooperate in other ways.
V. AI Supervision As a Cooperative Endeavour
We started this chapter by discussing some of the competitive dynamics which might be involved in AGI development. However, there is reason to hope that the process of increasing AI alignment is much more cooperative than the process of increasing AI capabilities. This is because misalignment could give rise to major negative externalities, especially if misaligned AIs are able to accumulate significant political, economic, or technological power (all of which are convergent instrumental goals). While we might think that it will be easy to ‘pull the plug’ on misbehaviour, this intuition fails to account for strategies which highly capable AIs might use to prevent us from doing so – especially those available to them after they have already amassed significant power. Indeed, the history of corporations showcases a range of ways that ‘agents’ with large-scale goals and economic power can evade oversight from the rest of society. And AIs might have much greater advantages than corporations currently do in avoiding accountability – for example, if they operate at speeds too fast for humans to monitor. One particularly stark example of how rapidly AI behaviour can spiral out of control was the 2010 Flash Crash, in which high-frequency trading algorithms got into a positive feedback loop and sent prices crashing within a matter of minutes.Footnote 36 Although the algorithms involved were relatively simple by the standards of modern machine learning (making this an example of accidental failure rather than misalignment), AIs sophisticated enough to reason about the wider world will be able to deliberately implement fraudulent or risky behaviour at increasingly bewildering scales.
Preventing them from doing so is in the interests of humanity as a whole; but what might large-scale cooperation to improve alignment actually look like? One possibility involves the sharing of important data – in particular data which is mainly helpful for increasing AI’s alignment rather than their capabilities. It is somewhat difficult to think about how this would work for current systems, as they don’t have the capabilities identified as prerequisites for being aligned in section 2. But as one intuition pump for how sharing data can differentially promote safety over other capabilities, consider the case of self-driving cars. The data collected by those cars during deployment is one of the main sources of competitive advantage for the companies racing towards autonomous driving, making them rush to get cars on the road. Yet, of that data, only a tiny fraction consists of cases where humans are forced to manually override the car steering, or where the car crashes. So while it would be unreasonably anticompetitive to force self-driving car companies to share all their data, it seems likely that there is some level of disclosure which contributes to preventing serious failures much more than to erasing other competitive advantages. This data could be presented in the form of safety benchmarks, simple prototypes of which include DeepMind’s AI Safety Gridworlds and the Partnership on AI’s SafeLife environment.Footnote 37
The example of self-driving cars also highlights another factor which could make an important contribution to alignment research: increased cooperation amongst researchers thinking about potential risks from AI. There is currently a notable divide between researchers primarily concerned about near-term risks and those primarily concerned about long-term risks.Footnote 38 Currently, the former tend to focus on supervising the activity of existing systems, whereas the latter prioritise automating the supervision of future systems advanced enough to be qualitatively different from existing systems. But in order to understand how to supervise future AI systems, it will be valuable to have access not only to technical research on scalable supervision techniques, but also to hands-on experience of how supervision of AIs works in real-world contexts and the best practices identified so far. So, as technologies like self-driving cars become increasingly important, we hope that the lessons learned from their deployment can help inform work on long-term risks via collaboration between the two camps.
A third type of cooperation to further alignment involves slowing down capabilities research to allow more time for alignment research to occur. This would require either significant trust between the different parties involved, or else strong enforcement mechanisms.Footnote 39 However, cooperation can be made easier in a number of ways. For example, corporations can make themselves more trustworthy via legal commitments such as windfall clauses.Footnote 40 A version of this has already been implemented in OpenAI’s capped-profit structure, along with other innovative legal mechanisms – most notably the clause in OpenAI’s charter which commits to assisting rather than competing with other projects, if they meet certain conditions.Footnote 41
We are aware that we have skipped over many of the details required to practically implement large-scale cooperation to increase AI alignment – some of which might not be pinned down for decades to come. Yet we consider it important to raise and discuss these ideas relatively early, because they require a few key actors (such as technology companies and the AI researchers working for them) to take actions whose benefits will accrue to a much wider population – potentially all of humanity. Thus, we should expect that the default incentives at play will lead to underinvestment in alignment research.Footnote 42 The earlier we can understand the risks involved, and the possible ways to avoid them, the easier it will be to build a consensus about the best path forward which is strong enough to overcome whatever self-interested or competitive incentives push in other directions. So despite the inherent difficulty of making arguments about how technological progress will play out, further research into these ideas seems vital for reducing the risk of humanity being left unprepared for the development of AGI.
I. Artificial Morality and Machine Ethics
Artificial Intelligence (AI) has the aim to model or simulate human cognitive capacities. Artificial Morality is a sub-discipline of AI that explores whether and how artificial systems can be furnished with moral capacities.Footnote 1 Its goal is to develop artificial moral agents which can take moral decisions and act on them. Artificial moral agents in this sense can be physically embodied robots as well as software agents or ‘bots’.
Machine ethics is the ethical discipline that scrutinizes the theoretical and ethical issues that Artificial Morality raises.Footnote 2 It involves a meta-ethical and a normative dimension.Footnote 3 Meta-ethical issues concern conceptual, ontological, and epistemic aspects of Artificial Morality like what moral agency amounts to, whether artificial systems can be moral agents and, if so, what kind of entities artificial moral agents are, and in which respects human and artificial moral agency diverge.
Normative issues in machine ethics can have a narrower or wider scope. In the narrow sense, machine ethics is about the moral standards that should be implemented in artificial moral agents, for instance: should they follow utilitarian or deontological principles? Does a virtue ethical approach make sense? Can we rely on moral theories that are designed for human social life, at all, or do we need new ethical approaches for artificial moral agents? Should artificial moral agents rely on moral principles at all or should they reason case-based?
In the wider sense, machine ethics comprises the deliberation about the moral implications of Artificial Morality on the individual and societal level. Is Artificial Morality a morally good thing at all? Are there fields of application in which artificial moral agents should not be deployed, if they should be used at all? Are there moral decisions that should not be delegated to machines? What is the moral and legal status of artificial moral agents? Will artificial moral agents change human social life and morality if they become more pervasive?
This article will provide an overview of the most central debates about artificial moral agents. The following section will discuss some examples for artificial moral agents which show that the topic is not just a problem of science fiction and that it makes sense to speak of artificial agents. Afterwards, a taxonomy of different types of moral agents will be introduced that helps to understand the aspirations of Artificial Morality. With this taxonomy in mind, the conditions for artificial moral agency in a functional sense will be analyzed. The next section scrutinizes different approaches to implementing moral standards in artificial systems. After these narrow machine ethical considerations, the ongoing controversy regarding the moral desirability of artificial moral agents is going to be addressed. At the end of the article, basic ethical guidelines for the development of artificial moral agents are going to be derived from this controversy.
II. Some Examples for Artificial Moral Agents
The development of increasingly intelligent and autonomous technologies will eventually lead to these systems having to face moral decisions. Already a simple vacuum cleaner like Roomba is, arguably, confronted with morally relevant situations. In contrast to a conventional vacuum cleaner, it is not directly operated by a human being. Hence, it is to a certain degree autonomous. Even such a primitive system faces basic moral challenges, for instance: should it vacuum and hence kill a ladybird that comes in its way or should it pull around it or chase it away? How about a spider? Should it extinguish the spider or save it?
One might wonder whether these are truly moral decisions. Yet, they are based on the consideration that it is wrong to kill or harm animals without a reason. This is a moral matter. Customary Roombas do, of course, not have the capacity to make such a decision. But there are attempts to furnish a Roomba prototype with an ethics module that does take animals’ lives into account.Footnote 4 As this example shows, artificial moral agents do not have to be very sophisticated and their use is not just a matter of science fiction. However, the more complex the areas of application of autonomous systems get, the more intricate are the moral decisions that they would have to make.
Eldercare is one growing sector of application for artificial moral agents. The hope is to meet demographic change with the help of autonomous artificial systems with moral capacities which can be used in care. Situations that require moral decisions in this context are, for instance: how often and how obtrusively should a care system remind somebody of eating, drinking, or taking a medicine? Should it inform the relatives or a medical service if somebody has not been moving for a while and how long would it be appropriate to wait? Should the system monitor the user at all times and how should it proceed with the collected data? All these situations involve a conflict between different moral values. The moral values at stake are, for instance, autonomy, privacy, physical health, and the concerns of the relatives.
Autonomous driving is the application field of artificial moral agents that probably receives the most public attention. Autonomous vehicles are a particularly delicate example because they do not just face moral decisions but moral dilemmas. A dilemma is a situation in which an agent has two (or more) options which are not morally flawless. A well-known example is the so-called trolley problem which goes back to the British philosopher Philippa Foot.Footnote 5 It is a thought experiment which is supposed to test our moral intuitions on the question whether it is morally permissible or even required to sacrifice one person’s life in order to save the lives of several persons.
Autonomous vehicles may face structurally similar situations in which it is inevitable to harm or even kill one or more persons in order to save others. Suppose a self-driving car cannot stop and it has only the choice to run into one of two groups of people: on the one hand, two elderly men, two elderly women and a dog; on the other hand, a young woman with a little boy and a little girl. If it hits the first group the two women will be killed, the two men and the dog are going to be severely injured. If it runs into the second group one of the children will get killed and the woman and the other child will be severely injured.
More details can be added to the situation at will. Suppose the group of the elderly people with the dog behaves in accord with the traffic laws, whereas the woman and the children cross the street against the red light. Is this morally relevant? Would it change the situation if one of the elderly men is substituted by a young medical doctor who might save many people’s lives? What happens if the self-driving car can only save the life of other traffic participants by sacrificing its passengers?Footnote 6 If there is no morally acceptable solution to these dilemmas, this might become a serious impediment for fully autonomous driving.
As these examples show, a rather simple artificial system like a vacuuming robot might already face moral decisions. The more intelligent and autonomous these technologies get, the more intricate the moral problems they confront will become; and there are some doubts as to whether artificial systems can make moral decisions which require such a high degree of sophistication, at all, and whether they should do so.
One might object that it is not the vacuuming robot, the care system, or the autonomous vehicle that makes a moral decision in these cases but rather the designers of these devices. Yet, progress in artificial intelligence renders this assumption questionable. AlphaGo is an artificial system developed by Google DeepMind to play the board game Go. It was the first computer program to beat some of the world’s best professional Go players on a full-sized board. Go is considered an extremely demanding cognitive game which is more difficult for artificial systems to win than other games such as chess. Whereas AlphaGo was trained with data from human games; the follow-up version AlphaGoZero was completely self-taught. It came equipped with the rules of the game and perfected its capacities by playing against itself without relying on human games as input. The next generation was MuZero which is even capable of learning different board games without being taught the rules.
The idea that the designers can determine every possible outcome already proves inadequate in the case of less complex chess programs. The program is a far better chess player than its designers who could certainly not compete with the world champions in the game. This holds true all the more for Go. Even if the programmers provide the system with the algorithms on which it operates, they cannot anticipate every single move. Rather, the system is equipped with a set of decision-making procedures that enable it to make effective decisions by itself. Due to the lack of predictability and control by human agents, it makes sense to use the term ‘artificial agent’ for this kind of system.
III. Classification of Artificial Moral Agents
Even if one agrees that there can be artificial moral agents, it is clear that even the most complex artificial systems differ from human beings in important respects that are central to our understanding of moral agency. It is, therefore, common in machine ethics to distinguish between different types of moral agents depending on how highly developed their moral capacities are.Footnote 7
One influential classification of moral agents goes back to James H. Moor.Footnote 8 He suggested a hierarchical distinction between four types of ethical agents.Footnote 9 It does not just apply to artificial systems but helps to understand which capacities an artificial system must have in order to count as a moral agent, although it might lack certain capacities which are essential to human moral agency.
The most primitive form describes agents who generate moral consequences without the consequences being intended as such. Moor calls them ethical impact agents. In this sense, every technical device is a moral agent that has good or bad effects on human beings. An example for an ethical impact agent is a digital watch that reminds its owners to keep their appointments on time. However, the moral quality of the effects of these devices lies solely in the use that is made of them. It is, therefore, doubtful whether these should really be called agents. In the case of these devices, the term ‘operational morality,’ which goes back to Wendell Wallach and Colin Allen, seems to be more adequate since it does not involve agency.Footnote 10
The next level is taken by implicit ethical agents, whose construction reflects certain moral values, for example security considerations. For Moor, this includes warning systems in aircrafts that trigger an alarm if an aircraft comes too close to the ground or if a collision with another aircraft is imminent. Another example are ATMs: these machines do not just have to always emit the right amount of money; they often also check whether money can be withdrawn from the account on that day at all. Moor even goes so far as to ascribe virtues to these systems that are not acquired through socialization, but rather directly grounded in the hardware. Conversely, there are also implicit immoral agents with built-in vices, for example a slot machine that is designed in such a way that people invest as much time and money as possible in it. Yet, as in the case of ethical impact agents these devices do not really possess agency since their moral qualities are entirely due to their designers.
The third level is formed by explicit ethical agents. In contrast to the two previous types of agents, these systems can explicitly recognize and process morally relevant information and come to moral decisions. One can compare them to a chess program: such a program recognizes the information relevant to chess, processes it, and makes decisions, with the goal being to win the game. It represents the current position of the pieces on the chessboard and can discern which moves are allowed. On this basis, it calculates which move is most promising under the given circumstances.
For Moor, explicit moral agents act not only in accordance with moral guidelines, but also on the basis of moral considerations. This is reminiscent of Immanuel Kant’s distinction between action in conformity with duty and action from duty.Footnote 11 Of course, artificial agents cannot strictly be moral agents in the Kantian sense because they do not have a will and they do not have inclinations that can conflict with the moral law. Explicit moral agents are situated somewhere in between moral subjects in the Kantian sense, who act from duty, and Kant’s example of the prudent merchant whose self-interest only accidentally coincides with moral duty. What Moor wants to express is that an explicit moral agent can discern and process morally relevant aspects as such and react in ways that fit various kinds of situations.
Yet, Moor would agree with Kant that explicit moral agents still fall short of the standards of full moral agency. Moor’s highest category consists of full ethical agents who have additional capacities such as consciousness, intentionality, and free will, which so far only human beings possess. It remains an open question whether machines can ever achieve these properties. Therefore, Moor recommends viewing explicit moral agents as the appropriate target of Artificial Morality. They are of interest from a philosophical and a practical point of view, without seeming to be unrealistic with regard to the technological state of the art.
Moor’s notion of an explicit ethical agent can be explicated with the help of the concept of functional morality introduced by Wallach and Allen.Footnote 12 They discriminate different levels of morality along two gradual dimensions: autonomy and ethical sensitivity. According to them, Moor’s categories can be situated within their framework.
A simple tool like a hammer possesses neither autonomy nor ethical sensitivity. It can be used to bang a nail or to batter somebody’s skull. The possibility of a morally beneficial or harmful deployment would, in Moor’s terminology, arguably justify calling it an ethical impact agent, but the artefact as such does not have any moral properties or capacity to act. A child safety lock in contrast does involve a certain ethical sensitivity despite lacking autonomy. It would fall into Moor’s category of an implicit ethical agent. Because its ethical sensitivity is entirely owed to the design of the object Wallach and Allen avoid the term of agency and speak of operational morality.
Generally, autonomy and ethical sensitivity are independent of each other.Footnote 13 There are, on the one hand, systems which possess a high degree of autonomy, but no (or not much) ethical sensitivity, for example an autopilot. On the other hand, there are systems with a high degree of ethical sensitivity, but no (or a very low degree of) autonomy, for example the platform ‘MedEthEx’ which is a computer-based learning program in medical ethics.Footnote 14 ‘MedEthEx’ as well as the autopilot belong to the category of functional morality for Wallach and Allen. Functional morality requires that a machine has ‘the capacity for assessing and responding to moral challenges’.Footnote 15 This does not necessarily seem to involve agency. If this is the case, there is a level of functional morality below the level of moral agency.Footnote 16 Therefore, it has to be specified in more detail which conditions a functional artificial moral agent has to meet.
IV. Artificial Systems As Functional Moral Agents
There seems to be an intuitive distinction between the things that merely happen to somebody or something and the things that an agent genuinely does.Footnote 17 The philosophical question is how to distinguish an action from a mere happening or occurrence and which capacities an object must have in order to qualify as an agent. The range of behaviors that count as actions is fairly broad. It starts from low-level cases of purposeful animal behavior like a spider walking across the table and extends to high-level human cases involving intentionality, self-consciousness, and free will.Footnote 18
A minimal condition for agency is interactivity, i.e. ‘that the agent and its environment [can] act upon each other.’Footnote 19 Yet, interactivity is not sufficient for agency. The interactions of an agent involve a certain amount of autonomy and intelligence which can vary in degree and type.
The view is expressed, for instance, by the following definition of an artificial agent:
The term agent is used to represent two orthogonal entities. The first is the agent’s ability for autonomous execution. The second is the agent’s ability to perform domain-oriented reasoning.Footnote 20
The term ‘autonomous execution’ means that, although the system is programmed, it acts in a specific situation without being operated or directly controlled by a human being. A higher degree of autonomy arises if a system’s behavior becomes increasingly flexible and adaptive, in other words, if it is capable of changing its mode of operation or learning.Footnote 21
Different natural and artificial agents can be situated at different levels of agency depending on their degree and type of autonomy and intelligence. They can, for instance, be classified as goal-directed agents, intentional agents, agents with higher order intentionality, or persons.Footnote 22 Distinctive of moral agency is a special kind of domain-oriented reasoning. Explicit ethical agents in Moor’s sense of the term would have to be able to act from moral reasons.
According to the philosophical standard theory which goes back to David Hume, a reason for an action consists in a combination of two mental attitudes: a belief and a pro-attitude. A belief consists in holding something true; a pro-attitude indicates that something ought to be brought about that is not yet the case. Desires are typical pro-attitudes. For this reason, the approach is also often called Belief-Desire-Theory. Take an example: The reason for my action of going to the library may be my desire to read Leo Tolstoy’s novel ‘Anna Karenina’, together with the belief that I will find the book in the library. Some versions of the standard theory assume that action explanation also has to refer to an intention that determines which desire will become effective and that includes some plan of action.Footnote 23 This accommodates the fact that we have a large number of noncommittal desires that do not lead to actions.Footnote 24
A moral action can thus be traced back to a moral reason, in other words to some combination of moral pro-attitude and corresponding belief. A moral reason may comprise, for instance, the utilitarian value judgment that it is good to maximize pleasure (pro-attitude) and the belief that making a donation to a charitable organization will result in the overall best balance of pleasure versus pain.Footnote 25
It is a matter of controversy whether artificial systems can possess mental states such as beliefs and desires. Some authors argue that this is not the case because artificial systems do not have intentionality. Intentionality in this sense refers to the fact that mental states like beliefs and desires are about or represent objects, properties, or states of affairs. Most famously Donald Davidson assumed that intentionality presupposes complex linguistic abilities which, only humans have.Footnote 26 Others concede that animals might also possess intentional states like beliefs and desires, although they do not meet Davidson’s strong requirements for rationality.Footnote 27 This seems to bring intentional agency within the reach of artificial systems as well.Footnote 28
Which stand one takes on this issue depends on the conditions that have to be fulfilled in order to attribute beliefs and desires to an artificial system. According to an instrumentalist view which is often ascribed to Daniel Dennett, attributing intentional states is just an explanatory strategy. He argues that states like beliefs and desires are attributed to an agent if this assumption helps us to better understand its behavior, independently of whether there are any corresponding inner states. Dennett calls this the intentional stance and the systems that can thus be explained intentional systems. What matters is that we can explain and predict a system’s behavior fruitfully by ascribing intentional states to it:
The success of the stance is of course a matter settled pragmatically, without reference to whether the object really has beliefs, intentions, and so forth; so whether or not any computer can be conscious, or have thoughts or desires, some computers undeniably are intentional systems, for they are systems whose behavior can be predicted, and most efficiently predicted, by adopting the intentional stance toward them.Footnote 29
Rational agency is thus a matter of interpretation and does not require that an entity actually possesses internal states, such as beliefs and desires. This condition can be satisfied by artificial systems. For example, if we can understand a chess computer by assuming that it wants to win the game and thinks that a certain move is appropriate to do so, then we can attribute the appropriate reason for action to the computer. Although the behavior of the computer could, in principle, be explained in purely physical terms, the intentional stance is particularly helpful with regard to complex systems.
In contrast, non-instrumental views are not satisfied with reducing intentionality to an attributional practice. Rather, an entity must have certain internal states that are functionally equivalent to beliefs and pro-attitudes.Footnote 30 If an artificial system possesses states which have an analogous function for the system as the corresponding mental states have in humans, the system may be called functionally equivalent to a human agent in this respect.
Since there are different ways of specifying the relevant functional relations, functional equivalence has to be seen relative to the type of functionalism one assumes. The most straightforward view with regard to Artificial Morality is machine functionalism which equates the mind directly with a Turing machine whose states can be specified by a machine table. Such a machine table consists of conditionals of the form: ‘if the machine is in state Si and receives input Ij it emits output Ok and goes into state Sl.’Footnote 31
Analytic functionalism specifies the relevant functional relations by the causal role of mental terms in folk psychology and rests on the analysis of the meanings of mental terms in ordinary language. Psycho-functionalism, in contrast, defines mental states by their functional role in scientific psychology. This leads to different ways of specifying the relevant inputs, outputs, and internal relations. Analytic functionalism relies on externally observable inputs and outputs, in other words, objects which are located in the vicinity of an organism and bodily movements, as well as common sense views about the causal relations between mental states. Psycho-functionalism can, in contrast, describe functional relations at a neuronal level.
The different types of functionalism also differ with respect to the granularity of their descriptions of the structure of mental states. Simple machine functionalism, for instance, takes mental states like beliefs or desires as unstructured entities. The representational theory of the mind, in contrast, regards mental states as representations with an internal structure that explains the systematic relations between them and the possibility to form indefinitely many new thoughts. The thought ‘John loves Mary’ has, for instance, the components ‘John’, ‘loves’ and ‘Mary’ as its constituents that can be combined to form other thoughts like ‘Mary loves John’.
The most famous proponent who combines a representational view with a computational theory of the mind is Jerry Fodor. He regards mental processes as Turing-style computations that operate over structured symbols which are similar to expressions in natural language and form a ‘language of thought’.Footnote 32 According to Fodor and a number of other cognitive scientists, Turing-style computation over mental symbols is ‘the only game in town’, in other words the only theory that can provide the foundations for a scientific explanation of the mind in cognitive science.Footnote 33
Although the computational model of the mind became enormously influential in the philosophy of mind and cognitive science, it has also been severely criticized. One of the most famous objections against it was developed by John Searle with the help of the thought experiment of the Chinese Room.Footnote 34 It is supposed to show that Turing-style computation is not sufficient for thought. Searle imagines himself in a room manually executing a computer program. Chinese symbols, that people from outside the room slide under the door, represent the input. Searle then produces Chinese symbols as an output on the basis of a manual of rules that links input and output without specifying the meaning of the signs. Hence, he produces the appearance of understanding Chinese by following a symbol processing program but does not actually have any language proficiency in Chinese. Because he does not know Chinese, these symbols are only meaningless squiggles to him. Yet, his responses make perfect sense to the Chinese people outside the room. The thought experiment is supposed to trigger the intuition that the system clearly does not understand Chinese, although its behavior is from the outside indistinguishable from a Chinese native speaker. One might also understand the argument as making the point that syntax is not sufficient for semantics, and that computers will never have genuine understanding viz. intentionality because they can only operate syntactically.
If Searle is right, machines cannot really possess mental states. They might, however, exhibit states that are functionally equivalent to mental states although they are not associated with phenomenal consciousness and have only derived intentionality mediated by their programmers and users. One might call such states quasi-beliefs, quasi-desires, etc.Footnote 35 This way of speaking borrows from the terminology of Kendall Walton, who calls emotional reactions to fiction (for example, our pity for the protagonist of the novel ‘Anna Karenina’) quasi-emotions.Footnote 36 This is because they do resemble real emotions in terms of their phenomenal quality and the bodily changes involved: we weep for Anna Karenina and feel sadness in the face of her fate. Unlike genuine emotions, quasi-emotions do not involve the belief that the object that triggers the emotion exists.
With artificial moral agents, it is the other way around. They possess only quasi-intentional states that are, unlike their genuine counterparts, not associated with phenomenal consciousness and have only derived intentionality to speak with Searle again. For an explicit moral agent in the sense specified above with regard to Moore’s classification of artificial moral agents, it seems to be sufficient to have such quasi-intentional states. Given the gradual view of moral agency that was introduced in this section, these agents may be functional moral agents although they are not full moral agents on a par with human beings. Arguments to the effect that artificial systems cannot be moral agents at all because they lack consciousness or free will are, hence, falling short.Footnote 37
Functional moral agents are, however, limited in two ways. First, the functional relations just refer to the cognitive aspect of morality. The emotional dimension could be considered only insofar as emotions can be functionally modelled independently of their phenomenal quality. Secondly, functional equivalence is relative to the type of functionalism embraced and functional moral agents possess (so far) at most a subset of the functional relations that characterize full human moral agents. This holds all the more since artificial system’s moral reasoning is to date highly domain specific.
It is also important to stress that the gradual view of agency does not imply that functional moral agents are morally responsible for their doings. From a philosophical point of view, the attribution of moral responsibility to an agent requires free will and intentionality.Footnote 38 These conditions are not met in the case of functional moral agents. Hence, they do not bear moral responsibility for their doings.
The most fruitful view for the design of artificial moral agents thus lies somewhere in between Dennett’s instrumentalist conception, which largely abstracts from the agent’s internal states, and computational functionalism as a reductive theory of the mind.Footnote 39 Dennett makes it too easy for machines to be moral agents. His position cannot provide much inspiration for the development of artificial moral agents because he sees the machine merely as a black box; Fodor’s psycho-functionalism, on the other hand, makes it extremely difficult.
V. Approaches to Moral Implementation: Top-Down, Bottom-Up, and Hybrid
Moral implementation is the core of Artificial Morality.Footnote 40 It concerns the question of how to proceed when designing an artificial moral agent. One standardly distinguishes between top-down, bottom-up, and hybrid approaches.Footnote 41 All three methods bring together a certain ethical view with a certain approach to software design.
Top-down approaches combine an ethical view that regards moral capacities as an application of moral principles to particular cases with a top-down approach to software design. The basic idea is to formulate moral principles like Kant’s categorical imperative, the utilitarian principle of maximizing utility, or Isaac Asimov’s three laws of robotics as rules in a software which is then supposed to derive what has to be morally done in a specific situation. One of the challenges that such a software is facing is how to get from abstract moral principles to particular cases. Particularly with respect to utilitarian systems, the question arises as to how much information they should take into account as ‘the consequences of an action are essentially unbounded in space and time’.Footnote 42 Deontological approaches might, in contrast, require types of logical inference which lead to problems with decidability.Footnote 43
A more fundamental objection against top-down approaches regarding Artificial Morality is the so-called frame problem. Originally, the frame problem referred to a technical problem in logic-based AI. Intuitively speaking, the issue is sorting out relevant from irrelevant information. In its technical form, the problem is that specifying the conditions which are affected by a system’s actions does not, in classical logic, license an inference to the conclusion that all other conditions remain fixed. Although the technical problem is largely considered as solved (even within strictly logic-based accounts), there remains a wider, philosophical version of the problem first stated by John McCarthy and Patrick Hayes which is not yet close to a solution.Footnote 44
The challenge is that potentially every new piece of information may have an impact on the whole cognitive system of an agent. This observation has been used as evidence against a computational approach to the mind because it seems to imply that central cognitive processes cannot be modelled by strictly general rules. A corresponding line of argument can also be turned against top-down approaches regarding Artificial Morality. As Terry Horgan and Mark Timmons point out, moral normativity is not fully systematizable by exceptionless general principles because of the frame problem.Footnote 45 Full systematizability is, however, not required for Artificial Morality, and Horgan and Timmons admit that a partial systematization of moral normativity via moral principles remains possible. The frame problem is, hence, not a knock-down argument against the possibility of top-down approaches to moral implementation although it remains a challenge for AI in general.
The alternative to top-down are bottom-up approaches which do not understand morality as rule-based. This view is closely related to moral particularism, a meta-ethical position that rejects the claim that there are strict moral principles and that moral capacities consist in the application of moral principles to particular cases.Footnote 46 Moral particularists use to think of moral capacities in terms of practical wisdom or in analogy to perception as attending to the morally relevant features (or values) that a situation instantiates. Moral perception views emphasize the individual sensibility to the moral aspects of a situation.Footnote 47 The concept of practical wisdom goes back to Aristotle who underlined the influence of contextual aspects which are induced by way of socialization or training. In order to bring these capacities about in artificial systems, bottom-up approaches in software design which start from finding patterns in various kinds of data have to be adapted to the constraints of moral learning. This can be done either with the help of an evolutionary approach or by mimicking human socialization.Footnote 48
Bottom-up approaches might thus teach us something about the phylo- and ontogenetical evolution of morality.Footnote 49 But, they are of limited suitability for implementing moral capacities in artificial systems because they pose problems of operationalization, safety, and acceptance. It is difficult to evaluate when precisely a system possesses the capacity for moral learning and how it will, in effect, evolve. Because the behavior of such a system is hard to predict and explain, bottom-up approaches are hardly suitable for practical purposes; they might put potential users at risk. Moreover, it is difficult to reconstruct how a system arrived at a moral decision. Yet, it is important that autonomous artificial systems do not just behave morally, as a matter of fact, but that the moral basis of their decisions is transparent. Bottom-up approaches should, as a consequence, be restricted to narrowly confined and strictly controlled laboratory conditions.
Top-down and bottom-up are the most common ways to think about the implementation of moral capacities in artificial systems. It is, however, also possible to combine the virtues of both types of approaches. The resulting strategy is called a hybrid approach. Hybrid approaches operate on the basis of a predefined framework of moral values which is then adapted to specific moral contexts by learning processes.Footnote 50 Which values are given depends on the area of deployment of the system and its moral characteristics. Although hybrid approaches are promising, they are still in the early stages of development. So, which approach to moral implementation should one choose? It does not make much sense to answer this question in the abstract. It depends on the purpose and context of use for which a system is designed. An autonomous vehicle will demand a different approach to moral implementation than a domestic care robot.
VI. Ethical Controversy about Artificial Moral Agents
Machine ethics, however, does not just deal with issues about moral agency and moral implementation. It also discusses the question of whether artificial moral agents should be approved from a moral point of view. This became a major topic in the last years because Artificial Morality is part of technological innovations that are disruptive and can change individual lives and society profoundly. Not least, a lot of effort and money is spent on research on artificial moral agents in different domains, which also receives a lot of public and media attention. A number of big companies and important economic players strongly push Artificial Morality in areas like autonomous driving, and politics removes, under the perceived economic pressure, more and more legal barriers that might so far prevent the commercial launch of these technologies.
The ethical evaluation ranges from a complete refusal of artificial moral agents, over balanced assessments stressing that the moral evaluation of Artificial Morality has to take into account the diversity of approaches and application contexts, to arguments for the necessity of artificial moral agents.Footnote 51 The following overview tries to take up the most salient issues but it does not intend to be exhaustive. It focusses on questions that arise specifically with respect to artificial moral agents and does not comment on topics like privacy that belong to the more generic discipline of ethics of AI.
1. Are Artificial Moral Agents Inevitable?
One important argument in the discussion is that artificial moral agents are inevitable.Footnote 52 The development of increasingly complex intelligent and autonomous technologies will eventually lead to these systems having to face morally problematic situations which cannot be fully controlled by human operators. If this is true, the need for artificial moral agents is eventually arising from technological progress. It would, however, be wrong to either accept this development fatalistically or to reject it as such, because inevitability is a conditional matter. If we want to use intelligent and autonomous technologies in certain areas of application, then this will inevitably lead to the need for artificial moral agents. Hence, we should deliberate in which areas of application – if any – it is right from a moral point of view to use such agents and in which areas it would be morally wrong.Footnote 53
2. Are Artificial Moral Agents Reducing Ethics to Safety?
Another motivation for building artificial moral agents is a concern with safety. The idea is that equipping machines with moral capacities can prevent them from harming human beings. It would, however, be wrong to reduce ethics to safety issues.Footnote 54 There are other important moral values that can conflict with safety and that have to be taken into consideration by an artificial moral agent. In the context of elder care, safety would, for instance, consist in avoiding health risks at all costs. Yet, this might conflict with the caretakers autonomy.Footnote 55 Although safety is a moral value that has to be taken into consideration in developing artificial moral agents, Artificial Morality cannot be reduced to it.
3. Can Artificial Moral Agents Increase Trust in AI?
A third aspect that is invoked in the discussion is that artificial moral agents will increase public trust in artificial intelligence. The hope is that Artificial Morality might in this way help to deal with the fears that many people feel with regard to artificial intelligence and robots and improve the acceptance of these technologies.Footnote 56 One must, however, distinguish between trust and reliance.Footnote 57 Trust is an emotional attitude that arises in a relationship involving mutual attitudes toward one another which are constitutive.Footnote 58 It does, for instance, lead to the feeling of being betrayed and not just disappointed when let down.Footnote 59 This presupposes the ascription of moral responsibility that must be denied to functional moral agents as argued above. Hence, we should rather speak of reliance instead of trust in artificial moral agents.
It is, moreover, advisable not to be too credulous with regard to artificial moral agents. The lack of predictability and control invoked before to justify why it is adequate to speak of moral agents is also a good reason for not relying blindly on them. The danger is that the term ‘Artificial Morality’ is suggestively used to increase unjustified acceptance although we should, from a moral point of view, rather keep a critical eye on artificial moral agents.
Even if artificial moral agents do not fulfill the conditions for trustworthiness, trust may play a role with respect to the design and development of artificial moral agents. Suggestions to ensure trust in these cases include a code of conduct for the designers of these devices, transparency with regard to moral implementation, and design of artificial moral agents, as well as standards and certifications for the development process comparable to FairTrade, ISO, or GMOs.Footnote 60 Particularly in areas of application that concern not just the users of artificial moral agents but affect the population more broadly or have a large impact on the public infrastructure, like autonomous driving, it is a political task to establish democratically legitimized laws for the design and development process of artificial moral agents or even to constrain their development if necessary.
4. Do Artificial Moral Agents Prevent Immoral Use by Design?
Another argument in favor of artificial moral agents is that they prevent being used immorally by design. Major objections against this argument are that this massively interferes with the autonomy of human beings and can lead to unfair results. Amazon is, for instance, about to install a system called Driveri in their delivery vehicles in the United States. This is an automated monitoring system that consists of high-tech cameras combined with a software which is used to observe and analyze the drivers’ behavior when operating the car. It gives real-time feedback in certain cases, for instance, when the driver is going too fast, seems to be distracted, or does not wear a seatbelt. When it comes to the conclusion that something went badly wrong, it will give the information to actual humans at the company.Footnote 61 The data are also used to evaluate the drivers and might lead to them being fired – by a machine. Amazon promotes the system as improving safety. But it is clear that it cannot take the subtleties and complexities of human life into account. Sometimes there are good reasons to deviate from the rules or there are special circumstances that the drivers could not influence. This may lead to unfair decisions and hardships that can destroy lives.Footnote 62
Consider some other examples: how about a woman who had a couple of drinks with her partner at home and then refuses to have sex with him. Imagine that her partner gets violent and the woman tries to get away by car but the breathalyzer reacts to the alcohol in her breath and does not let her start the car.Footnote 63 Is it the right decision from a moral point of view to prevent the woman from driving because she drank alcohol and to expose her to domestic violence? How about elderly persons at home who ask their service robots for another glass of wine or pizza every day? Should the robot deny to get these things if it thinks that they are a health risk for the user as it happens in the Swedish TV-series Real Humans? Examples like these show that it is far from clear which uses are strictly immoral and should be precluded by design. One might, of course, try to deal with the problem by giving people always the possibility to override the system’s decisions. But that would undermine the whole purpose of preventing immoral uses by design.
5. Are Artificial Moral Agents Better than Humans?
A yet stronger claim is that artificial moral agents are even morally better than humans because their behavior is not influenced by irrational impulses, psychopathologies, or emotional distress. They are impartial, not prone to bias, and they are not diverted from the path of virtue by self-interest. Moreover, machines may be superior to humans in their cognitive abilities. They are able to make decisions in fractions of a second, during which a human being cannot come to conscious decisions. This is used as an argument for leaving moral decisions to machines in particularly precarious situations, for example in war.Footnote 64
Apart from the fact that this argument presupposes an idealized view of AI which does, for instance, ignore the problem of algorithmic bias, several objections have been raised against it. Many argue that artificial systems lack important capacities that human moral agents possess. One point is that emotions are vital for moral judgment and reasoning and that artificial moral agents with emotions are ‘something not even on the horizon of AI and robotics’.Footnote 65
As explicated above, this point is somewhat simply put. Emotional AI is a strongly emergent research program inspired by the insights of research in psychology and neuroscience on the importance of emotions for intelligent behavior that goes back to the 1980s.Footnote 66 As with artificial moral agency, the state of the art consists in trying to model states that are functionally equivalent to emotions at different levels of granularity.Footnote 67 There are even attempts to build artificial moral agents with emotional or empathic capacities.Footnote 68 The crucial point is not that emotions are out of the reach of AI, it is that moral emotions involve consciousness and that there is serious doubt that consciousness can be computationally modelled. The crucial question is, therefore, whether functional moral agency is achievable without consciousness.
6. Does Reasonable Pluralism in Ethics Speak against Artificial Moral Agents?
A rather desperate move by the adversaries of Artificial Morality is to mount moral skepticism, subjectivism, or an error-theory of moral judgments against it.Footnote 69 It is true, if there is no moral right and wrong that is at least intersubjectively binding or if all moral judgments are false, then the development of artificial moral agents would not make sense from the start. But this strategy overstates the case and cures one evil with a worse one. The fact of reason, as Kant called it; our existing moral practice is enough for getting Artificial Morality off the ground if there are no other reasons against it.
Having said this, one still has to take into account the fact that there is no consensus about the correct moral theory, neither in the general public nor among philosophers. John Rawls calls this ‘the fact of reasonable pluralism’ and he thinks that it is due to burdens of judgment that we cannot overcome. Reasonable pluralism is, for him, ‘the inevitable long-run result of the powers of human reason at work within the background of enduring free institutions.’Footnote 70 The question then is which morality should be implemented in artificial systems.
The answer to this question depends on the context. Service, care, or household robots that only affect one individual could be programmed in a way that responds to the individual moral framework of the user.Footnote 71 If a system operates, in contrast, in the public sphere and its decisions inevitably concern the vital interests of other people apart from its user, the system’s behavior should be governed by generally binding political and legal regulations. This would hold, for instance, for autonomous driving. Ethical pluralism is no insurmountable obstacle to establishing laws with respect to controversial ethical issues in liberal democracies. Examples that show this are (at least in Germany) abortion or assisted dying. Although not every individual agrees entirely with the legal regulations in these cases, most citizens find them morally acceptable, although they are not immune to change. In 2020, the German Constitutional Court decided in response to a lawsuit of assisted suicide organizations to abrogate the general prohibition of assisted suicide. Of course, things get more complicated as soon as international standards are required.
The issues about abortion or assisted suicide have, moreover, certain characteristics that make it unclear whether they can be applied directly to artificial moral agents. The regulations set limits to the choices of individuals but they do not determine them. Yet, it is questionable whether artificial moral agents could and should have such latitudes or whether this is the privilege of full moral agents. Another important point is the difference between individual choices and laws. An individual might, for instance, decide to save a child instead of an elderly persona in a dilemma situation in autonomous driving but if politics decided to establish algorithms in autonomous vehicles by law that sacrifice elderly people in dilemma situations that seems to be a case of age discrimination.
7. Do Artificial Moral Agents Threaten Our Personal Bonds?
Another worry is that by fixing moral decisions algorithmically, one does not take into account that some situations lie beyond moral justification, as Bernard Williams puts it.Footnote 72 He argues that it would be ‘one thought too many’ if a husband, faced with the possibility of saving either his wife or a stranger, first has to think about whether it is compatible with his moral principles to give preference to his wife.Footnote 73 This is not just a matter of acting instinctively rather than on deliberation. It would be just as inappropriate for the husband to consider in advance whether he should save his wife if he were the captain of the ship and two strangers stood against his wife, or if he should save fifty strangers instead of his wife. The crucial point is that conducting these thought experiments would not be appropriate to the special relationship of mutually loving spouses. Such reasoning threatens to alienate us, according to Williams, from our personal bonds with family or friends. The problem is not just that an artificial moral agent could not make such a decision, the problem is that doing so would undermine its impartiality which was one of the main reasons why artificial moral agents might be considered as superior to human moral agents.
8. Which Impact Does Artificial Morality Have on Ethical Theory?
Examples like these have an impact on another issue as well. One might argue that Artificial Morality might help us to improve our moral theories. Human ethics is often fragmented and inconsistent. Creating artificial moral agents could contribute to making moral theory more consistent and unified because artificial systems can only operate on such a basis. Yet, the examples discussed raise the question whether it is good that Artificial Morality forces us to take a stance on cases that have so far not been up for decision or to which there are no clear ethical solutions as in the dilemma cases in autonomous driving. The necessity to decide such cases might, on the one hand, contribute to making our moral views more coherent and unified. On the other hand, the fact that Artificial Morality forces us to take a stance in these cases might incur guilt on us by forcing us to deliberately approve that certain people get harmed or even killed in situations like the dilemmas in autonomous driving. There may simply be cases that resist a definite final solution as Artificial Morality requires it. Some have argued that one should use algorithms that select randomly in such situations.Footnote 74 Yet, this solution contradicts the fact that in a specific dilemma situation there might well be morally preferable choices in this particular context although they cannot be generalized. What is more, a random-selecting algorithm seems to express an attitude towards human life that does not properly respect its unique value and dignity.Footnote 75
9. Is It Wrong to Delegate Moral Decision-Making to Artificial Moral Agents?
There are also worries to the effect that ‘outsourcing’ moral decisions to machines deprives human beings of a practice that is morally essential for humanity. According to Aristotle, acquiring expertise in moral reasoning belongs necessarily to a human being’s good life and this requires gaining moral understanding through practice.Footnote 76 Delegating moral decision-making to artificial moral agents will reduce the opportunities to exercise this capacity and will lead to a ‘de-skilling’ of humans with respect to morality.Footnote 77 One might rise to this challenge by pointing out that there are still many opportunities for humans to exercise and develop their moral skills.Footnote 78
Yet, there might be a deeper concern that this answer does not address. For Kant, being able to act morally is the source of our normative claims towards others. One might interpret this claim as saying that morality is a reciprocal practice between full moral agents that are autonomous in the sense of setting themselves ends and that are able to reason with each other in a distinctly second-personal way.Footnote 79 Functional moral agents cannot really take part in such a practice, and one might argue that delegating moral decisions to them violates this moral practice independently of the quantitative question of how often this is done. This is one of the reasons why creating a Kantian artificial moral agent might be contradictory.Footnote 80
10. Who Is Responsible for the Decisions of Artificial Moral Agents?
Finally, there is the concern that Artificial Morality might undermine our current practice of responsibility ascription. As was argued above, delegating morally relevant decisions to artificial systems might create so-called responsibility gaps. Robert Sparrow who coined this term uses the example of lethal autonomous weapon systems to argue that a responsibility gap arises if such a system violates the ethical or legal norms of warfare and the following conditions are fulfilled: (1) the system was not intentionally programmed to violate the ethical or legal norms of warfare; (2) it was not foreseeable that the use of the lethal autonomous weapon system would lead to this result; and (3) there was no human control over the machine from the start of the operation.Footnote 81
The problem is that if these three conditions are fulfilled, then moral responsibility cannot be attributed to any human when the machine kills humans in conflict with the moral or legal norms of warfare, because no human being had intended it, it was not foreseeable, and nobody had the possibility to prevent the result. Thus, a responsibility gap occurs precisely when the machine itself is not responsible, but its use undermines the terms of attributing responsibility to human beings. For Sparrow, this is a reason for rejecting the use of war robots as immoral because, at least when it comes to killing humans, there should always be someone who can be held responsible for the deaths.
VII. Conclusion: Guidelines for Machine Ethics
Which conclusions should we draw from the controversy about artificial moral agents? One suggestion is to place a moratorium on the commercialization of artificial moral agents. The idea is to allow academic research on Artificial Morality while at the same time protecting users, other concerned persons or groups, and society ‘from exposure to this technology which poses an existential challenge’.Footnote 82 This seems to be at least reasonable as long as we do not have good answers to the challenges and critical questions discussed in the last section.
There are, however, some loopholes that this suggestion does not address. A device like an autonomous car might, as a matter of fact, be designed as an artificial moral agent without being commercialized as such. This is possible because algorithms are often trade secrets. Another challenge is that moral decisions do not always have to be taken explicitly but might be hidden behind other parameters. An algorithm for autonomous driving might, for instance, give priority to the passengers’ safety by using certain technical parameters without making it explicit that this puts the risk on more vulnerable traffic participants.
The controversy about artificial moral agents does, however, not necessarily have to be seen as formulating impediments to research and innovation. The arguments might also be regarded as indicators for the directions that research on the design of artificial moral agents and their development should take. The lessons that have to be drawn from the controversy can be condensed in three fundamental guidelines for machine ethics:Footnote 83
(1) Moral machines should promote human autonomy and not interfere with it.
(2) Artificial systems should not make decisions about life and death of humans.
(3) It must be ensured that humans always take responsibility in a substantial sense.
In the light of these three guidelines for machine ethics, there are some areas of application of artificial moral agents that should be viewed critically from a moral point of view. This applies in particular to killer robots, but autonomous driving should also be considered carefully against this background. There is reason to assume that, in order to optimize accident outcomes, it is necessary to specify cost functions that determine who will be injured and killed which bear some similarity to lethal autonomous weapon systems. Legitimate targets would have to be defined for the case of an unavoidable collision, which would then be intentionally injured or even killed.Footnote 84 As long as the controversial issues are not resolved, robots should not get a license to kill.Footnote 85
Even if one does not want to hand over decisions about the life and death of human beings to artificial moral agents, there remain areas of application in which they might be usefully employed. One suggestion is a conceptual design of a software module for elder care that can adapt to the user’s individual moral value profile through training and permanent interaction and that can, therefore, treat people according to their individual moral value profile.Footnote 86 Under the conditions of reasonable pluralism, it can be assumed that users’ values with respect to care differ, for example, as to whether more weight should be given to privacy or to avoiding health risks. A care system should be able to weigh these values according to the moral standards of each individual user. In this case, a care system can help people who wish to do so to live longer in their own homes.
Such a system could be compared to an extended moral arm or prosthesis of the users. One could also speak of a moral avatar which might strengthen the care-dependent persons’ self-esteem by helping them to live according to their own moral standards. Yet, such a system is only suitable for people who are cognitively capable of making basic decisions about their lives but are so physically limited that they cannot live alone at home without care. It should also be clear that there is no purely technological solution to the shortage of care givers. It is essential to embed these technologies in a social framework. No one should be cared for by robots against their will. The use of care systems must also not lead to loneliness and social isolation among those receiving care.
A very demanding task is to make sure that humans always take responsibility in a substantial sense as the third principle demands. In military contexts, a distinction is made between in-the-loop systems, on-the-loop systems, and out-of-the-loop systems, depending on the role of the human in the control loop.Footnote 87 In the case of in-the-loop systems, a human operates the system and makes all relevant decisions, even if it is by remote control. On-the-loop systems are programmed and can operate in real time independent of human intervention. However, the human is still responsible for monitoring the system and can intervene at any time. Out-of-the-loop systems work like on-the-loop systems, but there is no longer any possibility of human control or intervention.
The problem of the responsibility gap appears to be solved if the human remains at least on-the-loop and perhaps even has to agree to take responsibility by pressing a button before putting an artificial system into operation.Footnote 88 But how realistic is the assumption that humans are capable of permanent monitoring? Can they maintain attention for that long, and are they ready to decide and intervene in seconds when it matters? If this is not the case, predictability and control would be theoretically possible, but not feasible for humans in reality.
Second, there arise epistemological problems, if the human operators depend on the information provided by the system to analyze the situation. The question is whether the users can even rationally doubt its decisions if they do not have access to independent information. In addition, such a system must go through a series of quality assurance processes during its development. This may also be a reason for users to consider the system’s suggestions as superior to their own doubts. Hence, the problem of the responsibility gap also threatens on-the-loop systems and it may even occur when humans remain in-the-loop.Footnote 89
Overall, it seems unfair that the users should assume full responsibility at the push of a button, because at least part of the responsibility, if not the main part, should go to the programmers, whose algorithms are decisive for the system’s actions. The users are only responsible in a weaker sense because they did not prevent the system from acting. A suitable approach must take into account the distribution of responsibility which does not make it easier to come to terms with the responsibility gap. One of the greatest challenges of machine ethics is, therefore, to define a concept of meaningful control and to find ways for humans to assume responsibility for the actions of artificial moral agents in a substantial sense.
I. Introduction
It seems undeniable that the coming years will see an ever-increasing reliance on artificial agents that are, on the one hand, autonomous in the sense that they process information and make decisions without continuous human input, and, on the other hand, fall short of the kind of agency that would warrant ascribing moral responsibility to the artificial agent itself. What I have in mind here are artificial agents such as self-driving cars, artificial trading agents in financial markets, nursebots, or robot teachers.Footnote 1 As these examples illustrate, many such agents make morally significant decisions, including ones that involve risks of severe harm to humans. Where such artificial agents are employed, the ambition is that they can make decisions roughly as good as or better than those that a typical human agent would have made in the context of their employment. Still, the standard by which we judge their choices to be good or bad is still considered human judgement; we would like these artificial agents to serve human ends.Footnote 2
Where artificial agents are not liable to be ascribed true moral agency and responsibility in their own right, we can understand them as acting as proxies for human agents, as making decisions on their behalf. What I will call the ‘Moral Proxy Problem’ arises because it is often not clear for whom a specific artificial agent is acting as a moral proxy. In particular, we need to decide whether artificial agents should be acting as proxies for what I will call low-level agents – for example individual users of the artificial agents, or the kinds of individual human agents artificial agents are usually replacing – or whether they should be moral proxies for what I will call high-level agents – for example designers, distributors, or regulators, that is, those who can potentially control the choice behaviour of many artificial agents at once. I am particularly interested in the Moral Proxy Problem insofar as it matters for decision structuring when making choices about the design of artificial agents. Who we think an artificial agent is a moral proxy for determines from which agential perspective the choice problems artificial agents will be faced with should be framed:Footnote 3 should we frame them like the individual choice scenarios previously faced by individual human agents? Or should we, rather, consider the expected aggregate effects of the many choices made by all the artificial agents of a particular type all at once?
Although there are some initial reasons (canvassed in Section 2) to think that the Moral Proxy Problem and its implications for decision structuring have little practical relevance for design choices, in this paper I will argue that in the context of risk the Moral Proxy Problem has special practical relevance. Just like most human decisions are made in the context of risk, so most decisions faced by artificial agents involve risk:Footnote 4 self-driving cars can’t tell with complete certainty how objects in their vicinity will move, but rather make probabilistic projections; artificial trading agents trade in the context of uncertainty about market movements; and nursebots might, for instance, need to make risky decisions about whether a patient symptom warrants raising an alarm. I will focus on cases in which the artificial agent can assign precise probabilities to the different potential outcomes of its choices (but no outcome is predicted to occur with 100% certainty). The practical design choice I am primarily concerned with here is how artificial agents should be designed to choose in the context of risk thus understood, and in particular whether they should be programmed to be risk neutral or not. It is for this design choice that the Moral Proxy Problem turns out to be highly relevant.
I will proceed by, in Section III, making an observation about the standard approach to artificial agent design that I believe deserves more attention, namely that it implies, in the ideal case, the implementation of risk neutral pursuit of the goals the agent is programmed to pursue. But risk neutrality is not an uncontroversial requirement of instrumentally rational agency. Risk non-neutrality, and in particular risk aversion, is common in choices made by human agents, and in those cases is intuitively neither always irrational, nor immoral. If artificial agents are to be understood as moral proxies for low-level human agents, they should emulate considered human judgements about the kinds of choice situations low-level agents previously found themselves in and that are now faced by artificial agents. Given considered human judgement in such scenarios, often exhibits risk non-neutrality, and in particular risk aversion; artificial agents that are moral proxies for low-level human agents should do so too, or should at least have the capacity to be set to do so by their users.
Things look differently, however, when we think of artificial agents as moral proxies for high-level agents, as I argue in Section IV. If we frame decisions from the high-level agential perspective, the choices of an individual artificial agent should be considered as part of an aggregate of many similar choices. I will argue that once we adopt such a compound framing, the only reasonable approach to risk is that artificial agents should be risk neutral in individual choices, because this has almost certainly better outcomes in the aggregate. Thus, from the high-level agential perspective, the risk neutrality implied by the standard approach appears justified. And so, how we resolve the Moral Proxy Problem is of high practical importance in the context of risk. I will return to the difficulty of addressing the problem in Section V, and also argue there that the practical relevance of agential framing is problematic for the common view that responsibility for the choices of artificial agents is often shared between high-level and low-level agents.
II. The Moral Proxy Problem
Artificial agents are designed by humans to serve human ends and/or make decisions on their behalf, in areas where previously human agents would make decisions. They are, in the words of Deborah Johnson and Keith Miller ‘tethered to humans’.Footnote 5 At least as long as artificial agents are not advanced enough to merit the ascription of moral responsibility in their own right, we can think of them as ‘moral proxies’ for human agents,Footnote 6 that is, as an extension of the agency of the humans on whose behalf they are acting. In any given context, the question then arises who they should be moral proxies for. I will refer to the problem of determining who, in any particular context, artificial agents ought to be moral proxies for as the ‘Moral Proxy Problem’. This problem has been raised in different forms in a number of debates surrounding the design, ethics, politics, and legal treatment of artificial agents.
Take, for instance, the debate on the ethics of self-driving cars, where Sven Nyholm points out that before we apply various moral theories to questions of, for example, crash optimisation, we must settle on who the relevant moral agent is.Footnote 7 In the debate on value alignment – how to make sure the values advanced AI is pursuing are aligned with those of humansFootnote 8 – the Moral Proxy Problem arises as the question of whose values AI ought to be aligned with, especially in the context of reasonable disagreement between various stakeholders.Footnote 9 In computer science, Vincent Conitzer has recently raised the question of ‘identity design’, that is, the question of where one artificial agent ends and another begins.Footnote 10 He claims that how we should approach identity design depends at least in part on whether we want to be able to assign separate artificial agents to each user, so that they can represent their users separately, or are content with larger agents that can presumably only be understood as moral proxies for larger collectives of human agents. Finally, in debates around moral responsibility and legal liability for potential harms caused by artificial agents, the Moral Proxy Problem arises in the context of the question of which human agent(s) can be held responsible and accountable when artificial agents are not proper bearers of responsibility themselves.
For the purposes of my argument, I would like to distinguish between two types of answers to the Moral Proxy Problem: on the one hand, we could think of artificial agents as moral proxies for what I will call ‘low-level agents’, by which I mean the types of agents who would have faced the individual choice scenarios now faced by artificial agents in their absence, for example, the individual users of artificial agents such as owners of self-driving cars, or local authorities using artificial health decision systems. On the other hand, we could think of them as moral proxies for what I will call ‘high-level agents’, by which I mean those who are in a position to potentially control the choice behaviour of many artificial agents,Footnote 11 such as designers of artificial agents, or regulators representing society at large.
I would also like to distinguish between two broad and connected purposes for which an answer to the Moral Proxy Problem is important, namely, ascription of responsibility and accountability on the one hand, and decision structuring for the purposes of design choices on the other. To start with the first purpose, here we are interested in who can be held responsible, in a backward-looking sense, for harms caused by artificial agents, which might lead to residual obligations, for example, to compensate for losses, but also who, in a forward-looking sense, is responsible for oversight and control of artificial agents. It seems natural that in many contexts, at least a large part of both the backward-looking and forward-looking responsibility for the choices made by artificial agents falls on those human agents whose moral proxies they are.
My primary interest in this paper is not the question of responsibility ascription, however, but rather the question of decision structuring, that is, the question of how the decision problems faced by artificial agents should be framed for the purposes of making design choices. The question of who is the relevant agent is in a particular context is often neglected in decision theory and moral philosophy but is crucial in particular for determining the scope of the decision problem to be analysed.Footnote 12 When we take artificial agents to be moral proxies for low-level human agents, it is natural to frame the relevant decisions to be made by artificial agents from the perspective of the low-level human agent. For instance, we could consider various problematic driving scenarios a self-driving car might find itself in, and then discuss how the car should confront these problems on behalf of the driver. Call this ‘low-level agential framing’. When we take artificial agents to be moral proxies for high-level agents, on the other hand, we should frame the relevant decisions to be made by artificial agents from the perspective of those high-level agents. To use the example of self-driving cars again, from the perspective of designers or regulators, we should consider the aggregate consequences of many self-driving cars repeatedly confronting various problematic driving scenarios in accordance with their programming. Call this ‘high-level agential framing’.
The issues of responsibility ascription and decision structuring are of course connected: when it is appropriate to frame a decision problem from the perspective of a particular agent, this is usually because the choice to be made falls under that agent’s responsibility. Those who think of artificial agents as moral proxies for low-level agents often argue in favour of a greater degree of control on the part of individual users, for instance by having personalisable ethics settings, whereby the users can alter their artificial agent’s programming to more closely match their own moral views.Footnote 13 Given such control, both decision structuring as well as most of the responsibility for the resulting choices should be low-level. But it is important to note here that the appropriate level of agential framing of the relevant decision problems and the level of agency at which we ascribe responsibility may in principle be different. We could, for instance, think of designers of artificial agents doing their best to design artificial agents to act on behalf of their users, but without giving the users any actual control over the design. As such, the designers could try to align the artificial agents with their best estimate of the users’ considered and informed values. In that case, decision framing should be low-level. But insofar as low-level agents aren’t actually in control of the programming of the artificial agents, we might think their responsibility for the resulting choices is diminished and should still lie mostly with the designers.
How should we respond to the Moral Proxy Problem for the purposes of decision structuring, then? In the literature on ethical dilemmas faced by artificial agents, a low-level response is often presupposed. The presumption of many authors there is that we can conclude fairly directly from moral judgements about individual dilemma situations (e.g., the much discussed trolley problem analogues) to how the artificial agents employed in the relevant context should handle them.Footnote 14 There is even an empirical ethics approach to making design decisions, whereby typical responses to ethical dilemmas that artificial agents might face are crowd-sourced, and then used to inform design choices.Footnote 15 This reflects an implied acceptance of artificial agents as low-level moral proxies. The authors mentioned who are arguing in favour of personalisable ethics settings for artificial agents also appear to be presupposing that the artificial agents they have in mind are moral proxies for low-level agents. The standard case for personalisable ethics settings is based on the idea that mandatory ethics settings would be unacceptably paternalistic. But imposing a certain choice on a person is only paternalistic if that choice was in the legitimate sphere of agency of that person in the first place. Saying that mandatory ethics settings are paternalistic thus presupposes that the artificial agents under discussion are moral proxies for low-level agents.
What could be a positive argument in favour of low-level agential framing? I can think of two main ones. The first draws on the debate over responsibility ascription. Suppose we thought that, in some specific context, the only plausible way of avoiding what are sometimes called ‘responsibility gaps’, that is, of avoiding cases where nobody can be held responsible for harms caused by artificial agents, was to hold low-level agents, and in particular users, responsible.Footnote 16 Now there seems to be something unfair about holding users responsible for choices by an artificial agent that (a) they had no design control over, and that (b) are only justifiable when framing the choices from a high-level agential perspective. Provided that, if we were to frame choices from a high-level agential perspective, we may sometimes end up with choices that are not justifiable from a low-level perspective, this provides us with an argument in favour of low-level agential framing. Crucially, however, this argument relies on the assumption that only low-level agents can plausibly be held responsible for the actions of artificial agents, which is of course contested, as well as on the assumption that there is sometimes a difference between what is morally justifiable when adopting a high-level and a low-level agential framing respectively, which I will return to.
A second potential argument in favour of a low-level response to the Moral Proxy Problem is based on the ideal of liberal neutrality, which is indeed sometimes invoked to justify anti-paternalism of the form proponents of personalisable ethics settings are committed to. The moral trade-offs we can expect many artificial agents to face are often ones there is reasonable disagreement about. We are then, in Rawlsian terms, faced with a political, not a moral problem:Footnote 17 how do we ensure fair treatment of all given reasonable pluralism? In such contexts, one might think higher-level agents, such as policy-makers or tech companies should maintain liberal neutrality; they should not impose one particular view on an issue that reasonable people disagree on. One way of maintaining such neutrality in the face of a plurality of opinion is to partition the moral space so that individuals get to make certain decisions themselves.Footnote 18 In the case of artificial agents, such a partition of the moral space can be implemented, it seems, by use of personalisable ethics settings, which implies viewing artificial agents as moral proxies for low-level agents.
At the same time, we also find in the responses to arguments in favour of personalisable ethics settings some reasons to think that perhaps there is not really much of a conflict, in practice, between taking a high-level and a low-level agential perspective. For one, in many potential contexts of application of artificial agents, there are likely to be benefits from coordination between artificial agents that each individual user can in fact appreciate. For instance, Jan Gogoll and Julian Müller point out the potential for collective action problems when ethics settings in self-driving cars are personalisable: each may end up choosing a ‘selfish’ setting, even though everybody would prefer a situation where everybody chose a more ‘altruistic’ setting.Footnote 19 If that is so, it is in fact in the interest of everybody to agree to a mandatory ‘altruistic’ ethics setting. Another potentially more consequential collective action problem in the case of self-driving cars is the tragedy of the commons when it comes to limiting emissions, which could be resolved by mandatory programming for fuel-efficient driving. And Jason Borenstein, Joseph Herkert, and Keith Miller point out the advantages, in general, of a ‘systems-level analysis’, taking into account how different artificial agents interact with each other, as their interactions may make an important difference to outcomes.Footnote 20 For instance, a coordinated driving style between self-driving cars may help prevent traffic jams and thus benefit everybody.
What this points to is that in cases where the outcomes of the choices of one artificial agent depend on what everybody else does and vice versa, and there are potential benefits for each from coordination and cooperation, it may seem like there will not be much difference between taking a low-level and a high-level agential perspective. From a low-level perspective, it makes sense to agree to not simply decide oneself how one would like one’s artificial agent to choose. Rather, it is reasonable from a low-level perspective to endorse a coordinated choice where designers or regulators select a standardised programming that is preferable for each individual compared to the outcome of uncoordinated choice. And notably, this move does not need to be in tension with the ideal of liberal neutrality either: in fact, finding common principles that can be endorsed from each reasonable perspective is another classic way to ensure liberal neutrality in the face of reasonable pluralism, in cases where partitioning the moral space in the way previously suggested can be expected to be worse for all. In the end, the outcome may not be so different from what a benevolent or democratically constrained high-level agent would have chosen if we thought of the artificial agents in question as high-level proxies in the first place.
Another potential reason for thinking that there may not really be much of a conflict between taking a high-level and a low-level agential perspective appears plausible in the remaining class of cases where we don’t expect there to be much of an interaction between the choices of one artificial agent and any others. And that is simply the thought that in such cases, what a morally reasonable response to some choice scenario is should not depend on agential perspective. For instance, one might think that what a morally reasonable response to some trolley-like choice scenario is should not depend on whether we think of it from the perspective of a single low-level agent, or as part of a large number of similar cases a high-level agent is deciding on.Footnote 21 And if that is so, at least for the purposes of decision structuring, it would not make a difference whether we adopt a high-level or a low-level agential perspective. Moreover, the first argument we just gave in favour of low-level agential framing would be undercut.
Of course, while this may result in the Moral Proxy Problem being unimportant for the purposes of decision structuring, this does not solve the question of responsibility ascription. Resolving that question is not my primary focus here. What I would like to point out, however, is that the idea that agential framing is irrelevant for practical purposes sits nicely with a popular view on the question of responsibility ascription, namely the view that responsibility is often distributed among a variety of agents, including both high-level and low-level agents. Take, for instance, Mariarosaria Taddeo and Luciano Floridi:
The effects of decisions or actions based on AI are often the result of countless interactions among many actors, including designers, developers, users, software, and hardware […] With distributed agency comes distributed responsibility.Footnote 22
Shared responsibility between, amongst others, designers and users is also part of Rule 1 of ‘the Rules’ for moral responsibility of computing artefacts championed by Miller.Footnote 23 The reason why the idea of shared responsibility sits nicely with the claim that agential framing is ultimately practically irrelevant is that in that case, no agent can be absolved from responsibility on the grounds that whatever design choice was made was not justifiable from their agential perspective. The following discussion will put pressure on this position. It will show that in the context of risk, quite generally, agential perspective in decision structuring is practically relevant. This is problematic for the view that responsibility for the choices of artificial agents is often shared between high-level and low-level agents and puts renewed pressure on us to address the Moral Proxy Problem in a principled way. I will return to the Moral Proxy Problem in Section V to discuss why this is, in fact, a hard problem to address. In particular, it will become apparent that the low-level response to the problem that is so commonly assumed comes with significant costs in many applications. The high-level alternative, however, is not unproblematic either.
III. The Low-Level Challenge to Risk Neutrality in Artificial Agent Design
I now turn to the question of how to design artificial agents to deal with risk, which I will go on to argue is a practical design issue which crucially depends on our response to the Moral Proxy Problem. Expected utility theory is the orthodox theory of rational choice under conditions of risk that, on the standard approach, designers of artificial agents eventually aim to implement. The theory is indeed also accepted by many social scientists and philosophers as a theory of instrumentally rational choice, and moreover incorporated by many moral philosophers when theorising about our moral obligations in the context of risk.Footnote 24 Informally, according to this theory, for any agent, we can assign both a probability and a utility value to each potential outcome of the choices open to them. We then calculate, for each potential choice, the probability-weighted sum of the utilities of the different potential outcomes of that choice. Agents should make a choice that maximises this probability-weighted sum.
One widely discussed worry about applying expected utility theory in the context of artificial agent design is that when risks of harm are imposed on others, the application of expected utility theory implies insensitivity to how ex ante risks are distributed among the affected individuals.Footnote 25 For instance, suppose that harm to one of two individuals is unavoidable, and we judge the outcomes where one or the other is harmed to be equally bad. Expected utility theory then appears unable to distinguish between letting the harm occur for certain for one of the individuals, and throwing a fair coin, which would give each an equal chance of being harmed. Yet the latter seems like an intuitively fairer course of action.
In the following, I would like to abstract away as much as possible from this problem, but rather engage with an independent concern regarding the use of expected utility theory when designing artificial agents that impose risks on others. And that is that, at least under the interpretation generally adopted for artificial agent design, the theory implies risk neutrality in the pursuit of goals and values, and rules out what we will call ‘pure’ risk aversion (or pure risk seeking), as I will explain in what follows. Roughly, risk aversion in the attainment of some good manifests in settling for an option with a lower expectation of that good because the range of potential outcomes is less spread out, and there is thus a lesser risk of ending up with bad outcomes. For instance, choosing a certain win of £100 over a 50% chance of £300 would be a paradigmatic example of risk aversion with regard to money. The expected monetary value of the 50% gamble is £150. Yet, to the risk averse agent, the certain win of £100 may be preferable because the option does not run the risk of ending up with nothing.
Expected utility theory can capture risk aversion through decreasing marginal utility in the good. When marginal utility is decreasing for a good, that means that, the more an agent already has of a good, the less additional utility is assigned to the next unit of the good. In our example, decreasing marginal utility may make it the case that the additional utility gained from receiving £100 is larger than the additional utility gained from moving from £100 to £300. If that is so, then the risk averse preferences we just described can be accommodated within expected utility theory: the expected utility of a certain £100 will be higher than the expected utility of a 50% chance of £300 – even though the latter has higher expected monetary value.
Whether this allows us to capture all ordinary types of risk aversion depends in part on what we think utility is. According to what we might call a ‘substantive’ or ‘realist’ understanding of utility, utility is a cardinal measure of degrees of goal satisfaction or value. On that view, expected utility theory requires agents to maximise their expected degree of goal satisfaction, or expected value. And having decreasing marginal utility, on this view, means that the more one already has of a good, the less one values the next unit, or the less the next unit advances one’s goals. On this interpretation, only agents who have decreasing marginal utility in that sense are permitted to be risk averse within expected utility theory. What is ruled out is being risk averse beyond what is explainable by the decreasing marginal value of a good. Formally, expected utility theory does not allow agents to be risk averse with regard to utility itself. On this interpretation, that means agents cannot be risk averse with regard to degrees of goal satisfaction, or value itself, which is what the above reference to ‘pure’ risk aversion is meant to capture. For instance, on this interpretation of utility, expected utility theory rules out that an agent is risk averse despite valuing each unit of a good equally.Footnote 26
Importantly for us, such a substantive conception of utility seems to be widely presupposed both in the literature on the design of artificial agents, as well as by those moral philosophers who incorporate expected utility theory when thinking about moral choice under risk. In moral philosophy, expected utility maximisation is often equated with expected value maximisation, which, as we just noted, implies risk neutrality with regard to value itself.Footnote 27 When it comes to artificial agent design, speaking in very broad strokes, on the standard approach we start by specifying the goals the system should be designed to pursue in what is called the ‘objective function’ (or alternatively, the ‘evaluation function’, ‘performance measure’, or ‘merit function’). For very simple systems, the objective function may simply specify one goal. For instance, we can imagine an artificial nutritional assistant whose purpose it is simply to maximise caloric intake. But in most applications, the objective function will specify several goals, as well how they are to be traded off. For instance, the objective function for a self-driving car will specify that it should reach its destination fast; use little fuel; avoid accidents and minimise harm in cases of unavoidable accident; and make any unavoidable trade-offs between these goals in a way that reflects their relative importance.
After we have specified the objective function, the artificial agent should be either explicitly programmed or trained to maximise the expectation of that objective function.Footnote 28 Take, for instance, this definition of rationality from Stuart Russell and Peter Norvig’s textbook on AI:
For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.Footnote 29
According to the authors, the goal of artificial agent design is to implement this notion of rationality as well as possible. But this just means implementing expected utility theory under a substantive understanding of the utility function as a performance measure capturing degrees of goal satisfaction.Footnote 30
So, we have seen that, by assuming a substantive interpretation of utility as a cardinal measure of value or degrees of goal satisfaction, many moral philosophers and designers of artificial agents are committed to risk neutrality with regard to value or goal satisfaction itself. However, such risk neutrality is not a self-evident requirement of rationality and/or morality. Indeed, some moral philosophers have defended a requirement to be risk averse, for instance when defending precautionary principles of various forms, or famously John Rawls in his treatment of choice behind the veil of ignorance.Footnote 31 And the risk neutrality of expected utility theory under the substantive interpretation of utility has been under attack recently in decision theory as well, for example by Lara Buchak.Footnote 32
To illustrate, let me introduce two scenarios that an artificial agent might find itself in, where the risk neutral choice appears intuitively neither morally nor rationally required, and where indeed many human agents can be expected to choose in a risk averse manner.
Case 1: Artificial Rescue Coordination Centre. An artificial rescue coordination centre has to decide between sending a rescue team to one of two fatal accidents involving several victims. If it chooses Accident 1, one person will be saved for certain. If it chooses Accident 2, on the other hand, there is a 50% chance of saving three and a 50% chance of saving nobody. It seems plausible in this case that the objective function should be linear in lives saved, all other things being equal – capturing the idea that all lives are equally valuable. And let us suppose that all other morally relevant factors are indeed equal between the two options open to the rescue coordination centre.Footnote 33 In this scenario, a risk neutral rescue coordination centre would always choose Accident 2, because the expected number of lives saved (1.5) is higher. However, I submit that many human agents, if they were placed in this situation with time to deliberate, would choose Accident 1 and thus exhibit risk aversion. Moreover, doing so is neither intuitively irrational nor immoral. If this is not compelling, consider the case where attending to Accident 2 comes with only a 34% chance of saving three. Risk neutrality still requires choosing Accident 2. But it is very hard to see what would be morally or rationally wrong with attending to Accident 1 and saving one for certain instead.
Case 2: Changing Lanes. A self-driving car is driving in the left lane of a dual carriageway in the UK and is approaching a stumbling person on the side of the road. At the same time, a car with two passengers is approaching from behind on the right lane. The self-driving car estimates there is a small chance the other car is approaching fast enough to fatally crash into it should it change lanes (Changing Lanes), and a small albeit three times higher chance that the person on the side of the road could trip at the wrong time and consequently be fatally hit by the self-driving car should it not change lanes (Not Changing Lanes). Specifically, suppose that Not Changing Lanes comes with a 0.3% chance of killing one, meaning the expected number of fatalities is 0.003. Changing Lanes, on the other hand, comes with a 0.1% chance of killing two, meaning the expected number of fatalities is 0.002. Suppose that the passenger of the self-driving car will be safe either way. It seems plausible that the objective function should be linear in accidental killings, all other things being equal – again capturing the idea that all lives are equally valuable. And let us again suppose that all other morally relevant factors are indeed equal between the two options open to the self-driving car. In this scenario, a risk neutral car would always choose Changing Lanes, because the expected number of fatalities is lower. However, I submit that many human agents would, even with time to reflect, choose Not Changing Lanes to rule out the possibility of killing 2, and thus exhibit risk aversion. Moreover, doing so is neither intuitively irrational nor immoral.
These admittedly very stylised cases were chosen because they feature an objective function uncontroversially linear in the one value at stake, in order to illustrate the intuitive permissibility of pure risk aversion. Most applications will, of course, feature more complex objective functions trading off various concerns. In such cases, too, the standard approach to artificial agent design requires risk neutrality with regard to the objective function itself. But again, it is not clear why risk aversion should be ruled out, for example when a nursebot that takes into account both the potential value of saving a life and the cost of calling a human nurse faces a risky choice about whether to raise an alarm.
In the case of human agents, we tend to be permissive of a range of pure risk attitudes, including different levels of pure risk aversion. There appears to be rational and moral leeway on degrees of risk aversion, and thus room for reasonable disagreement. Alternatives to expected utility theory, such as Buchak’s risk-weighted expected utility theory, as well as expected utility theory under some interpretations other than the substantive one, can accommodate such rational leeway on attitudes towards risk.Footnote 34 But the commitment to expected utility theory under a substantive interpretation of utility, as we find it in the literature on the design of artificial agents, rules this out and imposes risk neutrality instead – which is a point not often acknowledged, and worth emphasising.
To return to the Moral Proxy Problem, suppose that we want artificial agents to be low-level moral proxies. In the preceding examples, we have already picked the right agential framing then: we have structured the relevant decision problem as an individual choice situation as it might previously have been faced by a low-level human agent. A low-level moral proxy should, in some relevant sense, choose in such a way as to implement considered human judgement from the low-level perspective. Under risk, this plausibly implies that we should attempt to align not only the artificial agent’s evaluations of outcomes, but also its treatment of risk to the values and attitudes of the low-level agents it is a moral proxy for. There are different ways of making sense of this idea, but on any such way, it seems like we need to allow for artificial agents to sometimes exhibit risk aversion in low-level choices like the ones just discussed.
As we have seen before, some authors who view artificial agents as low-level moral proxies have argued in favour of personalisable ethics settings. If there is, as we argued, reasonable disagreement about risk attitudes, artificial agents should then also come with personalisable risk settings. If we take an empirical approach and crowd-source and then implement typical judgements on ethical dilemma situations like the ones just discussed, we will likely sometimes need to implement risk averse judgements as well. Lastly, in the absence of personalisable ethics and risk settings but while maintaining the view of artificial agents as low-level moral proxies, we can also view the design decision as the problem of how to make risky choices on behalf of another agent while ignorant of their risk attitudes. One attractive principle for how to do so is to implement the most risk averse of the reasonable attitudes towards risk, thereby erring on the side of being safe rather than sorry when choosing for another person.Footnote 35 Again, the consequence would be designing artificial agents that are risk averse in low-level decisions like the ones we just considered.
We have seen, then, that in conflict with the standard approach to risk in artificial agent design, if we take artificial agents to be low-level moral proxies, we need to allow for them to display pure risk aversion in some low-level choice contexts like the ones just considered. The next section will argue that things look quite different, however, if we take artificial agents to be high-level moral proxies.
IV. Risk Aversion and the High-Level Agential Perspective
Less stylised versions of the scenarios we just looked at are currently faced repeatedly by different human agents and will in the future be faced repeatedly by artificial agents. While such decisions are still made by human agents, there is usually nobody who is in control of a large number such choice problems: human rescue coordinators will usually not face such a dramatic decision multiple times in their lives. And most drivers will not find themselves in such dangerous driving situations often. The regulatory reach of higher-order agents such as policy-makers over human agents is also likely to be limited in these scenarios and many other areas in which artificial agents might be introduced to make decisions in place of humans – both because human agents in such choice situations have little time to reflect and will thus often be excused for not following guidelines, and because, in the case of driving decisions in particular, there are limits to the extent to which drivers would accept being micromanaged by the state.
Things are different, however, once artificial agents are introduced. Now there are higher-level agents, in particular designers, who can directly control the choice behaviour of many artificial agents in many instances of the decision problems we looked at in the last section. Moreover, these designers have time to reflect on how decisions are to be made in these choice scenarios and have to be explicit about their design choice. This also gives greater room for other higher-level agents, such as policy-makers, to exert indirect control over the choices of artificial agents, by regulating the design of artificial agents. Suppose we think that artificial agents in some specific context should in fact be thought of as moral proxies not for low-level agents such as individual users of self-driving cars, but rather as moral proxies for such high-level agents. From the perspective of these higher-level agents, what seems most relevant for the design choice are the expected aggregate consequences of designing a whole range of artificial agents to choose in the specified ways on many different occasions. I want to show here that this makes an important difference in the context of risk.
To illustrate, let us return to our stylised examples, starting with a modified version of Case 1: Artificial Rescue Coordination Centre:
Suppose some high-level agent has to settle at once on one hundred instances of the choice between Accident 1 and Accident 2. Further, suppose these instances are probabilistically independent, and that the same choice needs to be implemented in each case. The two options are thus always going for Accident 1, saving one person for certain each time, or always going for Accident 2, with a 50% chance of saving three each time. The expected aggregate outcome of going for Accident 1 one hundred times is, of course, saving one hundred people for certain. The expected aggregate result of going for Accident 2 one hundred times, on the other hand, is a probability distribution with an expected number of one hundred and fifty lives saved, and, importantly, a <0.5% chance of saving fewer lives than if one always went for Accident 1. In this compound case, it now seems unreasonably risk averse to choose the ‘safe option’.
Similarly, if we look at a compound version of Case 2: Changing Lanes:
Suppose a higher-level agent has to settle at once how 100,000 instances of that choice should be made, where these are again assumed to be probabilistically independent, and the same choice has to be made on each instance. One could either always go for the ‘safe’ option of Not Changing Lanes. In that case, the expected number of fatalities is 300, with a <0.1% chance of less than 250 fatalities. Or one could always go for the ‘risky’ option of Changing Lanes. In that case, the expected number of fatalities is only 200, with only a ~0.7% chance of more than 250 fatalities. As before, the ‘risky’ option is thus virtually certain to bring about a better outcome in the aggregate, and it would appear unreasonably risk averse to stick with the ‘safe’ option.
In both cases, as the number of repetitions increases, the appeal of the ‘risky’ option only increases, because the probability of doing worse than on the ‘safe’ option becomes ever smaller. We can also construct analogous examples featuring more complex objective functions appropriate for more realistic cases. It remains true that as independent instances of the risky choice problem are repeated, at some point the likelihood of doing better by each time choosing a safer option with lower expected value becomes very small. From a sufficiently large compound perspective, the virtual certainty of doing better by picking a riskier option with higher expected value is decisive. And thus, when we think of artificial agents as moral proxies for high-level agents that are in a position to control sufficiently many low-level decisions, designing the artificial agents to be substantially risk averse in low-level choices seems impermissible. From the high-level agential perspective, the risk neutrality implied by the current standard approach in artificial agent design seems to, in fact, be called for.Footnote 36
The choice scenarios we looked at are similar to a case introduced by Paul Samuelson,Footnote 37 which I discuss in more detail in another paper.Footnote 38 Samuelson’s main concern there is that being moderately risk averse in some individual choice contexts by, for example, choosing the safer Accident 1 or Not Changing Lanes, while at the same time choosing the ‘risky’ option in compound cases is not easily reconcilable with expected utility theory (under any interpretation).Footnote 39 It is undeniable, though, that such preference patterns are very common. And importantly, in the cases we are interested in here, no type of agent can actually be accused of inconsistency, because we are dealing with two types of agents with two types of associated choice problems. One type of agent, the low-level agent who is never faced with the compound choice, exhibits the reasonable seeming risk averse preferences regarding ‘small-scale’ choices to be made on her behalf. And another type of agent, the high-level agent, exhibits again reasonable-seeming preferences in compound choices that translate to effective risk neutrality in each individual ‘small-scale’ choice scenario.
The take-away is thus that how we respond to the Moral Proxy Problem is of practical relevance here: If we take artificial agents to be moral proxies for low-level agents, they will sometimes need to be programmed to exhibit risk aversion in the kinds of individual choice contexts where they are replacing human agents. If we take them to be moral proxies for high-level agents, they should be programmed to be risk neutral in such choice contexts, as the current approach to risk in artificial agent design in fact implies, because this has almost certainly better consequences in the aggregate.
V. Back to the Moral Proxy Problem
We saw in Section II that the Moral Proxy Problem matters for decision structuring: whether we take artificial agents to be moral proxies for low-level or high-level agents determines from which agential perspective we are framing the relevant decision problems. I raised the possibility, alluded to by some authors, that resolving the Moral Proxy Problem one way or the other is of little practical relevance, because agential framing does not make a practical difference for design choices. The issue of whether artificial agents should be designed to be risk neutral or allowed to be risk averse, discussed in the last two sections, is then an especially challenging one in the context of the Moral Proxy Problem, because it shows the hope for this irrelevance to be ungrounded: agential perspective turns out to be practically crucial.
Notably, the stylised examples we discussed do not describe collective action or coordination problems where each can recognise from her low-level perspective that a higher-level agent could implement a coordinated response that would be superior from her perspective and everybody else’s. Crucially, both the outcomes and the probabilities in each of the lower-level choice contexts are independent in our examples. And having a particular design imposed by a higher-level agent does not change the potential outcomes and probabilities of the choice problem faced by any particular artificial agent. It only changes the actual choice in that lower-level choice problem from a potentially risk averse to a risk neutral one. This is not something that a risk averse lower-level agent would endorse.
It thus becomes practically important to resolve the Moral Proxy Problem. And for the purposes of decision structuring, at least, it is not an option to appeal to the notion of distributed agency to claim that artificial agents are moral proxies for both low-level and high-level agents. Adopting one or the other agential perspective will sometimes call for different ways of framing the relevant decision problem, and we need to settle on one specification of the decision problem before we can address it. Where we imagine there being a negotiation between different stakeholders in order to arrive at a mutually agreeable result, the framing of the decision problem to be negotiated on will also need to be settled first. For decision structuring, at least, we need to settle on one agential perspective.
For reasons already alluded to, the fact that substantially different designs may be morally justified when decision problems are framed from the high-level or the low-level agential perspective is also problematic for ascribing shared responsibility for the choices made by artificial agents. If different programmings are plausible from the high-level and low-level perspective, it may seem unfair to hold high-level agents (partially) responsible for choices justified from the low-level perspective and vice versa. If, based on a low-level framing, we end up with a range of risk averse self-driving cars that cause almost certainly more deaths in the aggregate, there is something unfair about holding designers responsible for that aggregate result. And if, based on a high-level framing, we in turn end up with a range of risk neutral self-driving cars, which, in crash scenarios frequently save nobody when they could have saved some for sure, there is something unfair about holding individual users responsible for that tough call they would not have endorsed from their perspective.Footnote 40 At least, it seems like any agent who will be held responsible for some (set of) choices has some rightful claim for the decision problem to be framed from their agential perspective. But where agential perspective makes a practical difference not all such claims can be fulfilled.
Let us return now to the problem of decision structuring, where, for the reasons just mentioned, we certainly need to resolve the Moral Proxy Problem one way or the other. However we resolve it, there are major trade-offs involved. I already mentioned some potential arguments in favour of low-level agential framing. There is, for one, the idea that low-level agential framing is natural if we want to hold low-level agents responsible. If we don’t have an interest in holding low-level agents responsible, this is, of course, not a relevant consideration. But I would also like to add an observation about moral phenomenology that may have at least some political relevance. Note that users and owners of artificial agents are in various senses morally closer to the potentially harmful effects of the actions of their artificial agents than designers or policy-makers: they make the final decision of whether to deploy the agent; their lives may also be at stake; they often more closely observe the potentially harmful event and have to live with its memory; and users are often asked to generally maintain responsible oversight of the operations of the artificial agent. All this may, at least, result in them feeling more responsible for the actions of their artificial agent. Such a feeling of responsibility and moral closeness without control, or without at least the sense that efforts were made for the choices of the artificial agent to capture one’s considered judgements as well as possible is a considerable burden.
A second argument we made in favour of low-level agential framing appealed to the idea of liberal neutrality in the face of reasonable disagreement, which could be implemented effectively by partitioning the moral space so as to leave certain decisions up to individuals. Such partitioning seems like an effective way to implement liberal neutrality especially in the absence of collective action problems that may create general agreement on a coordinated response. Given the independence in outcomes and probabilities, the cases we have discussed indeed do not constitute such collective action problems, but they do feature reasonable disagreement in the face of rational and moral leeway about risk attitudes. I believe that the ideal of liberal neutrality is thus a promising consideration in favour of low-level agential framing.
What the preceding sections have also made clear, however, is that low-level agential framing in the context of risk may come at the cost of aggregate outcomes that are almost certainly worse than the expected consequences of the choices that seem reasonable from the high-level agential perspective. This consequence of low-level agential framing is, as far as I know, unacknowledged, and may be difficult for proponents of low-level agential framing to accept.
If we respond to the Moral Proxy Problem by adopting a high-level agential perspective in those contexts instead, this problem is avoided. And other considerations speak in favour of thinking of artificial agents as moral proxies for high-level agents. An intuitive thought is this: as a matter of fact, decisions that programmers and those regulating them make determine many lower-level choices. In that sense they are facing the compound choice, in which the almost certainly worse aggregate outcome of allowing lower-level risk aversion appears decisive. In order to design artificial agents to be (risk averse) moral proxies for individual users, designers would have to abstract away from these very real aggregate implications of their design decisions. This may put designers in a similarly difficult position to the owner of a self-driving car that she knows may make choices that seem reckless from her perspective.
Following on from this, arguments in favour of holding high-level agents responsible will also, at least to some extent, speak in favour of high-level agential framing, because again it seems high-level agential framing is natural when we want to hold high-level agents responsible. We find one potential argument in favour of ascribing responsibility to high-level agents in Hevelke and Nida-Rümelin’s appeal to moral luck.Footnote 41 Their starting point is that whether individual artificial agents ever find themselves in situations where they have to cause harm is in part down to luck. For instance, it is in part a matter of luck whether, and if so how often, any artificial agent finds itself in a dangerous driving situation akin to the one described in Case 2 mentioned earlier. And, no matter how the agent chooses, it is a further matter of luck whether harm is actually caused. Where harm is caused, it may seem unfair to hold the unlucky users of those cars responsible, but not others who employed their artificial agents no differently. Alexander Hevelke and Julian Nida-Rümelin take this observation to speak in favour of ascribing responsibility collectively to the group of all users of a type of artificial agent. But finding responsibility with other high-level agents, such as the companies selling the artificial agents would also avoid the problem of moral luck. And then it also makes sense to adopt a high-level perspective for the purposes of decision structuring.
Still, the practical relevance of agential framing also brings about and highlights costs of settling for a high-level solution to the Moral Proxy Problem that are worth stressing: this solution will mean that, where artificial agents operate in areas where previously human agents made choices, these artificial agents will make some choices that are at odds with even considered human judgement. And the high-level solution will introduce higher-level control, be it by governments or tech companies, in areas where previously decision-making by humans has been decentralised, and in ways that don’t simply reproduce what individual human agents would have (ideally) chosen for themselves. In this sense, the high-level solution involves a significant restructuring of our moral landscape.
VI. Conclusion
I have argued that the Moral Proxy Problem, the problem of determining what level of human (group) agent artificial agents ought to be moral proxies for, has special practical relevance in the context of risk. Moral proxies for low-level agents may need to be risk averse in the individual choices they face. Moral proxies for high-level agents, on the other hand, should be risk neutral in individual choices, because this has almost certainly better outcomes in the aggregate. This has a number of important implications. For one, it means we actually need to settle, in any given context, on one response to the Moral Proxy Problem for purposes of decision structuring at least, as we don’t get the same recommendations under different agential frames. This, in turn, puts pressure on the position that responsibility for the choices of artificial agents is shared between high-level and low-level agents.
My discussion has also shown that any resolution of the Moral Proxy Problem involves sacrifices: adopting the low-level perspective implies designers should make design decisions that have almost certainly worse aggregate outcomes than other available design decisions, and regulators should not step in to change this. Adopting the high-level perspective, on the other hand, involves designers or regulators imposing specific courses of action in matters where there is intuitively rational and moral leeway when human agents are involved and where, prior to the introduction of new technology, the state and tech companies exerted no such control. It also risks absolving users of artificial agents of felt or actual responsibility for the artificial agents they employ, and having them live with consequences of choices they would not have made.
Finally, I have shown that because the way in which expected utility theory is commonly understood and implemented in artificial agent design implies risk neutrality regarding goal satisfaction, it involves, in a sense, a tacit endorsement of the high-level response to the Moral Proxy Problem which makes such risk neutrality generally plausible. Given low-level agential framing, risk aversion is intuitively neither always irrational nor immoral, and is in fact common in human agents. The implication is that if we prefer a low-level response to the Moral Proxy Problem in at least some contexts, risk aversion should be made room for in the design of artificial agents. Whichever solution to the Moral Proxy Problem we settle on, I hope my discussion has at least shown that the largely unquestioned implementation of risk neutrality in the design of artificial agents deserves critical scrutiny and that such scrutiny reveals that the right treatment of risk is intimately connected with how we answer difficult questions about agential perspective and responsibility in a world increasingly populated by artificial agents.
I. Introduction
Artificial Intelligence (AI) is a rapidly advancing yet much misunderstood technology. Vastly different definitions of AI, ranging from AI as a mere tool to an intelligent being, give rise to contradicting assessments of the possibilities and dangers of AI. A clearer concept of AI is needed to come to a better understanding of the possibilities of responsible governance of AI. In particular, the relation of AI to the world we live in needs to be clarified. This chapter shows that AI integrates into the human lifeworld much more thoroughly than other technology, and that the integration needs to be understood within a wider picture.
The reasons for the unclear concept of AI do not merely lie in AI’s novelty, but also in the fact that it is an extraordinary technology. This chapter will take a fresh look at the unique nature of AI. The concept of AI here is restricted to computational systems: hard- and software that make up devices and applications which may but do not usually resemble humans. This chapter rejects the common assumption that AI is necessarily a simulation or even replication of humans or of human capacities and explains that what distinguishes AI from other technologies is rather its special relation to the world we live in.
The world we live in includes ordinary physical nature, which humans have been extensively changing with the help of technology – in constructive and in destructive ways. Human life is constantly becoming more bound to technology, up to the degree that the consequences of the use of technology threaten the most fundamental conditions of life on earth. Even small conveniences provided by technology, such as taking a car or plane instead of a bicycle or public transportation, matter more to most of us than the environmental damage they cause. Our dependence on technology has become so self-evident that a standard answer to the problems caused by technology is that they will be taken care of by future technology.
Technology is not only changing the physical world, however, and this chapter elaborates why this is especially true for AI. The world we live in is also what philosophers since Edmund Husserl have called the ‘lifeworld’ (Lebenswelt).Footnote 1 As the ‘world of actually experiencing intuition’,Footnote 2 the lifeworld founds higher-level meaning-formation.Footnote 3 It is hence not only a ‘forgotten meaning-fundament of natural science’Footnote 4 but the ‘horizon of all meaningful induction’.Footnote 5 The lifeworld is not an assumed reality behind experience, but the world we actually experience, which is meaningful to us in everyday life. Husserl himself came from mathematics to philosophy, and the concept of lifeworld culminates his lifelong occupation with the relation between mathematics and experience. He elaborates in detail how, over the course of centuries, the lifeworld became ‘mathematized’.Footnote 6 In today’s expression, we may say that the lifeworld becomes ‘digitized’.Footnote 7 This makes Husserl’s concept of lifeworld especially interesting for AI. While Husserl was mostly concerned with the universal structures of experience, however, this chapter will use the concept of lifeworld in a wider sense that includes social and cultural structures of experience, common sense, and language, as well as rules and laws that order common everyday activities.
Much of technology becomes integrated into the lifeworld in the sense that its use becomes part of our ordinary lives, for example in the forms of tools we use. AI, however, also integrates into the lifeworld in an especially intimate way: by intelligently navigating and changing meaning and experience. This does not imply human-like intelligence, which involves consciousness and understanding. Rather, AI makes use of different means, which may or may not resemble human intelligence. What makes them intelligent is not their apparent resemblance to human capacities, but the fact that they navigate and change the lifeworld in ways that make sense to humans. For instance, a self-driving car must ‘recognize’ stop signs and act accordingly, but AI recognition may be very different from human recognition.
Conventional high-tech, such as nuclear power plants, does not navigate the space of human meaning and experience. Even technologies that aim at changing meaning and experience, such as TV and the Internet, will look primitive in comparison to future AI’s active and fine-grained adaptation to the lifeworld. AI is set to disrupt the human lifeworld more profoundly than conventional technologies, not because it will develop consciousness and will, but because it integrates into the lifeworld in a way not known from previous technology. A coherent understanding of how AI technology relates to the world we live in is necessary to assess its possible uses, benefits, and dangers, as well as the possibilities for responsible governance of AI.
AI attends to and possibly changes not just physical aspects of the lifeworld, but also those of meaning and experience, and it does so in exceedingly elaborate, ‘intelligent,’ ways. Like other technology, AI takes part in many processes that do not directly affect the lifeworld. In contrast to other technology, however, AI integrates into the lifeworld in the just delineated special sense. Doing so had before been reserved to humans and animals. While it should be self-evident that AI does not need to use the same means, such as conscious understanding, the resemblance to human capacities has caused much confusion. It is probably the strongest reason for the typical conceptions of AI as a replication or simulation of human intelligence, conceptions that have misled the assessment of AI and lie behind one-sided enthusiasm and alarmism about AI. It is time to explore a new way of explaining how AI integrates into the lifeworld, as will be done in this chapter.
The investigation starts in Section II with an analysis of the two prevalent conceptions of AI in relation to the world. Traditionally and up to today, the relation of AI to the world is either thought to be that of an object in the world, such as a tool, or that of a subject that experiences and understands the world, or a strange mixture of object and subject. In particular, the concept of AI as a subject has attracted much attention. Already the Turing Test compares humans and machines as if they were different persons, and early visionaries believed AI could soon do everything a human can do. Today, a popular question is not whether AI will be able to simulate all intelligent human behaviour, but when it will be as intelligent as humans.
Section III argues that the subject and the object conception of AI both fundamentally misrepresent the relation of AI to the world. It will be shown that this has led to grave misconceptions of the chances and dangers of AI technology and has hindered both the development and assessment of AI. The attempt to directly compare AI with humans is deeply ingrained in the history of AI, and this chapter analyses in detail how the direct comparison plays out already in the setup of the Turing Test.
Section IV shows that the Turing Test allows for intricate exchanges and is much harder on the machine than it appears at first sight. By making the evaluator part of the experiment, the Turing Test passes on the burden of evaluation, but does not remove it.
The multiple roles of the evaluator are differentiated in Section V. Making the evaluator part of the test covers up the difference between syntactic data and the semantic meaning of data, and it hides in plain sight that the evaluator adds the understanding that is often attributed to the AI. We need a radical shift of perspective that looks beyond the core computation of the AI and considers how the AI itself is embedded in the wider system, which includes the lifeworld.
Section VI will map out further the novel approach to the relation of AI to lifeworld. It elaborates how humans and AI relate to the lifeworld in very different ways. The section explores how the interrelations of AI with humans and data enable AI to represent and simulate the lifeworld. In their interaction, these four parts constitute a whole that allows a better understanding of the place of AI.
II. The Object and the Subject Conception of AI
While in today’s discussions of AI there is a widespread sense that AI will fundamentally change the world we live in, assessments of the growing impact of AI on the world differ widely. The fundamental disagreements already start with the definition of AI. There is a high degree of uncertainty about whether AI is a technology comparable to objects such as tools or machines, or to subjects of experience and understanding, such as humans.
Like other technologies, AI is often reduced to material objects, such as tools, devices, and machines, which are often simply called ‘technology’, together with the software that runs on them. The technological processes in which material technological devices take part, however, are also called ‘technology.’ This latter use is closer to the Greek root of technology, technē (τέχνη), which refers to particular kinds of making or doing. Today, ‘technology’ is primarily used to refer to technological hard- and software and only secondarily to their use. To refer to the hard- and software that makes up an AI, this chapter will simply speak of an ‘AI’. The application of conventional concepts to AI makes it look as if there were only two fundamentally different possibilities to conceive of the relation of AI to the world: that of (1) an object and (2) a subject.
The first takes AI to be an object such as a tool or a machine and assesses its impact on the world we live in in the same categories as that of conventional technologies. It is certainly true that AI can be part of devices we can use for certain purposes, good or bad. Because tools enable and suggest certain uses, and disable or discourage others, they are not neutral objects. Tools are objects that are embedded in a use, which means that they mediate the relationship of humans to the world.Footnote 8 These are important aspects of AI technology. The use of technology cannot be ignored and there are attempts to focus on the interaction between material objects and their use, such as ‘material engagement theory.’Footnote 9 The chapter at hand affirms that such theories take a step in the right direction and yet shows that they do not go far enough to understand the nature of AI. It is not wrong to say that AI systems are material objects that are used in certain ways (if ‘material object’ includes data and software), but this does not suffice to account for this novel technology. While conceiving AI as a mere object used in particular ways is true in some respects, it does not tell the whole story.
AI exhibits features we do not know from any conventional technology. Devices that make use of AI can do things otherwise only known from the intelligent and autonomous behaviour of humans and sometimes animals. AI systems can process large amounts of meaningful data and use it to navigate the lifeworld in meaningful ways. They can perform functions so complex they are hard to fathom but need to be explained in ordinary language.Footnote 10 AI systems are not mere objects in the world, nor are they only objects that are used in particular ways, such as tools. Rather, they actively relate to the world in ways that often would require consciousness and understanding if humans were to do them.Footnote 11 AI here changes subjective aspects of the lifeworld, although it does not necessarily experience or understand, or simulate experience or understanding. The object concept of AI ignores the fact that AI can operate on meaningful aspects of the world and transform them in meaningful ways. No other technology in the history of humanity has done so. AI indeed entails enormous potential – both to do good and to inflict harm.
The subject concept of AI (2) attempts to account for the fact that AI can do things we otherwise only know from humans and animals. AI is imagined as a being that relates to the world analogously to a living subject: by subjectively experiencing and understanding the world by means of mental attitudes such as beliefs and desires. The most common form of the subject account of AI is the idea that AI is something more or less like a human, and that it will possibly develop into a super-human being. Anthropomorphic conceptions of AI are often based on an animistic view of AI, according to which software has a mind, together with the materialistic view that brains are computers.Footnote 12 Some proponents who hold this view continue the science-fiction narrative of aliens coming to earth.Footnote 13 Vocal authors claim that AI will at one point in time be intelligent in the sense that it will develop a mind of its own. They think that Artificial General Intelligence (AGI) will engage in high-level mental activities and claim that computers will literally attain consciousness and develop their own will. Some speculate that this may happen very soon, in 2045,Footnote 14 or at least well before the end of this century.Footnote 15 Estimates like these are used to justify either enthusiastic salvation phantasies,Footnote 16 or alarmistic warnings of the end of humanity.Footnote 17 In the excitement caused by such speculations, however, it is often overlooked that they promote a concept of AI that has more to do with science fiction than actual AI science.
Speculative science fiction phantasies are only one, extreme, expression of the subject conception of AI. The next section investigates the origin of the subject conception of AI in the claim that AI can simulate human intelligence. The comparison with natural intelligence is already suggested by the term AI, and the next sections investigate why the comparison of human and artificial intelligence has misled thinking on AI. There is a sense in which conceiving of AI as a subject is due to a lack rather than a hypertrophy of phantasy: the lack of imagination when it comes to alternative ways of understanding the relation of AI to the world. The basic problem with the object and subject conceptions of AI is that they apply old ways of thinking to a novel technology that calls into question old categories such as that of object and subject. Because these categories are deeply rooted in human thought, they are hard to overcome. In the next section, I argue that the attempt to directly compare them is misleading and the resulting confusion prone to hinder both the development and assessment of AI.
III. Why the Comparison of Human and Artificial Intelligence Is Misleading
Early AI researchers did not try to artificially recreate consciousness but rather to simulate human capabilities. Today’s literal ascriptions of behaviour, thinking, experience, understanding, or authorship to machines ignore a distinction that was already made by the founders of the study of ‘Artificial Intelligence.’ AI researchers such as John McCarthy, Marvin Minsky, Nathaniel Rochester, and Claude Shannon were aware of the difference between, on the one hand, thinking, experiencing, understanding and, on the other, their simulation.Footnote 18 They did not claim that a machine could be made that could literally understand. Rather, they thought that “every aspect of learning or any other feature of intelligence can in principle be so precisely described that a machine can be made to simulate it.”Footnote 19
If AI merely simulates some human capacities, it is an object with quite special capacities. For many human capacities, such as calculating, this prospect is relatively unexciting and does not contradict the object idea of AI. The idea that AI can simulate core or even all features of intelligence, however, gives the impression of some mixture of subject and object, an uncanny ‘subject-object.’Footnote 20 In the case of McCarthy et al.,Footnote 21 the belief in the powers of machine intelligence goes along with a belief that human intelligence is reducible to the workings of a machine. But this is a very strong assumption that can be questioned in many respects. Is it really true that all aspects of learning and all other features of intelligence can be precisely described? Are learning and intelligence free of ambiguity and vagueness?
Still today, nearly 70 years later, and despite persistent efforts to precisely describe learning and intelligence, there is no coherent computational account of all learning and intelligence. Newer accounts often question the assumption that learning and intelligence are reduceable to computation.Footnote 22 While more caution with regard to bold prophecies would seem advisable, the believers in AGI do not think that the fact that we have no general computational account of intelligence speaks against AGI. They believe that, even though we do not know how human intelligence works, we will somehow be able to artificially recreate general intelligence. Or, if not us, then the machines themselves will do it. This is not only deemed a possibility, but a necessity. The fact that such beliefs are based on speculation and not a clear concept of their alleged possibility is hidden behind seemingly scientific numerical calculations that produce precise results such as the number ‘2045’ for the year in which the supposedly certain and predictable event of ‘singularity’ will happen, which is when the development of ‘superhuman intelligence’ becomes uncontrollable and leads to the end of the ‘human era’.Footnote 23
In the 1950s and 1960s, the idea that AI should simulate human intelligence was not far off from the efforts of actual AI research. Today, however, most real existing AI does not even attempt to simulate human behaviour and thinking. Only a small part of AI research attempts to give the appearance of human intelligence, although that part is still disproportionally represented in the media. For the most widely used AI technologies, such as Machine Learning (ML), this is not the case. The reason is obvious: machines are most effective not when they attempt to simulate human behaviour but when they make full use of their own strengths, such as the capability to process vast amounts of data in little time. The idea that AI must simulate human intelligence has little to do with the actual development of AI. Even more disconnected from reality are the speculations around the future rise of AGI and its potential consequences.
Yet, even in serious AI research, such as on ML, the tendency to think of AI in comparison to humans persists. When ML is covered, then often by using comparisons to human intelligence that are easily misleading, such as “system X is better than humans in recognizing Y.” Such claims tend to conceal that there are very specific conditions under which the ML system is better than humans. ‘Recognition’ is defined with respect to input-output relations. The machine is made the measure of all things. It is conveniently overlooked that current ML capabilities break down already in apparently straightforward ‘recognition’ tasks when there are slight changes to the input. The reason is simple: the ML system is usually not doing the same thing humans do when they recognize something. Rather, it uses means such as data correlation to replace recognition tasks or other work that had before been done by humans – or to accomplish things that before had not been possible or economic. Clearly, none of this means that ML becomes human-like. Even in social robotics, it is not always conducive for social interaction to build robots that resemble humans as closely as possible. One disadvantage is expressed in the concept of ‘uncanny valley’ (or ‘uncanny cliff’Footnote 24), which refers to the foundering of acceptance of humanoid robots when their close resemblance evokes eerie feelings. Claiming that AI systems are becoming human-like makes for sensationalistic news but does not foster clear thought on AI.
While AI systems are sometimes claimed to be better than humans at certain tasks, they have obvious troubles when it comes to ‘meaning, reasoning, and common-sense knowledge’,Footnote 25 all of which are fundamental to human intelligence. On the other hand, ML in particular can process inhuman amounts of data in little time. If comparisons of AI systems with humans makes sense at all, then only with reservations and with regard to aspects of limited capabilities. Because of the vast differences between the capabilities, AI is not accurately comparable to a human, not even to an x-year-old child.
For the above reasons, the definitions of AI as something that simulates or replicates human intelligence are misleading. Such anthropomorphic concepts of AI are not apt to understand and assess AI. We need a radically different approach that better accounts for how AI takes part in the world we live in. A clear understanding of the unique ways in which AI is directed to the lifeworld does not only allow for a better assessment of the impact of AI on the lifeworld but is furthermore crucial for AI research itself. AI research suffers from simplistic comparisons of artificial and human intelligence, which make progress seem alternatively very close or unreachable. Periods in which it seems as if AI would soon be able to do anything a human can do alternate with disappointment and the drying out of funding (‘AI Winter’Footnote 26). Overcoming of the anthropomorphic concept of AI contributes to more steady progress in AI science.
How natural it is for humans to reduce complex developments to simplistic notions of agency is obvious in animistic conceptions of natural events and in conspiracy theories. Because AI systems show characteristics that appear like human agency, perception, thought, or autonomy, it is particularly tempting to frame AI in these seemingly well-known terms. This is not necessarily a problem as long as it is clear that AI cannot be understood in analogy to humans. Exactly this is frequently suggested, however, by the comparison of AI systems to humans with respect to some capacity such as ‘perception.’ Leaving behind the idea that AI needs to be seen in comparison to natural intelligence allows us to consider anew how different AI technologies such as ML can change, disrupt, and transform processes by integrating into the lifeworld. But this is easier said than done. The next section shows how deeply rooted the direct comparison of humans and AI is in the standard account of AI going back to Alan Turing.
IV. The Multiple Roles of the Evaluator in the Turing Test
The Turing Test is the best-known attempt to conceive of a quasi-experimental setting to find out whether a machine is intelligent or not.Footnote 27 Despite its age – Turing published the thought experiment, later called the ‘Turing Test’, in 1950 – it is still widely discussed today. It can serve as an illustrative example for the direct comparison of AI to humans and how this overlooks their specific relations to the world. In this section I argue that by making the ‘interrogator’ part of the experiment, the Turing Test only seemingly avoids difficult philosophical questions.
Figure 5.1 shows a simple diagram of the Turing Test. A human and the AI machinery are put in separate rooms and, via distinct channels, exchange text messages with an ‘interrogator’ who has, apart from the content of the messages, no clues as to which texts stem from the human and which from the machine. The machine is built in such a way that the answers it gives to the questions of the ‘interrogator’ appear as if they were from a human. It competes with the human in the other room, who is supposed to convince the evaluator that their exchange is between humans. The ‘interrogator’ is not only asking questions but is furthermore tasked to judge which of the entities behind the respective texts is a human. If the human ‘interrogator’ cannot correctly distinguish between the human and the machine, the machine has passed the Turing Test.
Figure 5.1 The Turing Test
The Turing Test is designed to reveal, in a straightforward way, whether a machine can be said to exhibit intelligence. By limiting the exchanges to texts, the design puts the human and the AI on the same level. This allows for a direct comparison of their respective outputs. As pointed out by Turing himself, the direct comparison with humans may be unfair to the machine because it excludes the possibility that the machine develops other kinds of intelligence that may not be recognized by the human ‘interrogator’.Footnote 28 It furthermore does not take into consideration potential intelligent capabilities of the AI that do not express in exchanges of written text. On the side of the human, the restriction to text exchanges excludes human intelligence that cannot be measured in text exchanges. Textual exchanges are just one of many forms in which intelligent behaviour and interaction of humans may express itself. While the limitation to textual exchanges enables a somewhat ‘fair’ evaluation, at the same time it distorts the comparison.
At first sight, the Turing Test seems to offer only a few possibilities of interaction by means of texts. Turing’s description of the test suggests that the ‘interrogator’ merely ask questions and the human or the AI give answers. Already interrogation can consist of extreme vetting and involve a profound psychological examination as well as probing of the consistence of the story unveiled in the interrogation.Footnote 29 Furthermore, there is nothing in the setup that limits the possible interchanges to questions and answers. The text exchanges may go back and forth in myriad ways. The ‘interrogator’ is as well a conversation partner who engages in the text-driven conversations. He or she takes on, at the same time, the multiple roles of interrogator, reader, interpreter, interlocuter, conversation partner, evaluator, and judge. This chapter uses the wider term ‘evaluator’, which is less restrictive than ‘interrogator’ and is meant to comprise all mentioned roles.
Like other open-ended text exchanges, the Turing Test can develop in intricate ways. Turing was surely aware of the possible intricacies of the exchanges because the declared origin of his test is the ‘Imitation Game.’Footnote 30 The Imitation Game involves pretending to be of a different gender, a topic Turing may have been confronted with in his own biography. If we conceive the exchanges in terms of Wittgenstein’s concept of language-games, it is clear that the rules of the language game are usually not rigid but malleable and sometimes can be changed in the course of the language-game itself.Footnote 31 In free exchanges that involve ‘creative rule-following’,Footnote 32 the interchange may seem to develop on its own due to the interplay of possibly changing motivations, interests, and emotions, as well as numerous natural and cultural factors. While the intricate course of a conversation often seems logical in hindsight, it can be hard to predict even for humans, and exceedingly so for those who do not share the same background and form of life.
Mere prediction of probable words can result in texts that make sense up to a certain degree. Without human editing, they may appear intelligent in the way a person can appear intelligent who rambles on about any trigger word provided by the ‘conversation’ ‘partner’. It is likely to leave the impression of somebody or something that did not understand or listen to the other. Text prediction is not sufficient to engage in a genuine conversation. The claim that today’s advanced AI prediction systems such as GPT-3 are close to passing the Turing TestFootnote 33 are much exaggerated as long as the test is not overly limited by external factors such as a narrow time frame, or a lack of intelligence, understanding, and judgement on the part of the human evaluator.
The Turing Test is thus as much a test of the ‘intelligence’ of an AI system as it is a test of how easy (or hard) it is to trick a human into believing that some machine-generated output constitutes a text written by a human. That was probably the very idea behind the Turing test: tricking a human into believing that one is a human is a capability that surely requires intelligence. The fact that outside of the Turing Test it is often astonishingly easy to trick a human into believing there was an intelligent being behind some action calls into question the idea that humans always show an impressive ‘intelligence.’ The limitations of human intelligence can hence make it easier for a machine to pass a Turing Test. The machine could also simply attempt to pretend to be a human with limited language capabilities. On the other hand, however, faking human flaws can be very difficult for machines. Human mistakes and characteristics such as emotional reactions or tiredness are natural to humans but not to machines and may prove difficult to simulate.Footnote 34 If the human evaluator is empathetic, he or she is likely to have a feeling for emotional states expressed in the texts. Thus, not only the intellectual capabilities of the evaluator but also their, in today’s expression, ‘emotional intelligence’ plays a role. All of this may seem self-evident for humans, which is why it may be easy to overlook how much the Turing Test asks of the evaluator.
Considering the intricate exchanges possible in the Turing Test, the simplicity of its setup is deceptive. Turing set up the test in a way that circumvents complicated conceptual issues involved in the question ‘can machines think?’ It only does so, however, because it puts the burden of evaluation on the evaluator, who needs to figure out whether the respective texts are due to intelligence or not. If, however, we attempt to unravel the exact relations between the evaluator, the other human, the machine, the texts, and the world, we are back to the complicated conceptual, philosophical, and psychological questions Turing attempted to circumvent with his test.
The evaluator may not know that such questions are implicitly involved in her or his evaluation and instead may find the decision obvious or decide by gut feeling. But the better the machine simulates a human and the more difficult it becomes to distinguish it from a human, the more relevant for the evaluation becomes a differentiated consideration of the conditions of intelligence. Putting the burden of decision on the evaluator or anybody else does not solve the complicated conceptual issues that are brought up by machines that appear intelligent. For the evaluator, the process of decision is only in so far simplified that the setup of the Turing Test prevents her or him from inspecting the outward appearance or the internal workings of the machine. The setup frames the evaluation, which also means that it may mislead the evaluation by hiding in plain sight the contribution of the evaluator.
V. Hidden in Plain Sight: The Contribution of the Evaluator
While the setup of the Turing Test puts the burden of assessing whether a machine is intelligent on the evaluator, it also withholds important information from the evaluator. Because it prevents the evaluator from knowing anything about the processes behind the outputs, one can always imagine that some output was produced by means other than understanding. We need to distinguish two meanings of ‘intelligent’ and avoid the assumption that the one leads to the other. ‘Intelligent’ in the first sense concerns the action, which involves understanding of the meaning of the task. Task-solving without understanding the task, for example, by looking up the solutions in the teacher’s manual, is usually not called an ‘intelligent’ solution of the task, at least not in the same sense.
The other sense of ‘intelligent’ refers to the solution itself. In this sense, the solution can be intelligent even when it was produced by non-intelligent means. Because the result is the same as that achieved by understanding, and the evaluator in the Turing Test only gets to see the results, he or she is prevented from distinguishing between the two kinds of intelligence. At the same time, however, the design suggests that intelligence in the second sense amounts to intelligence in the first sense. The Turing Test replaces the question ‘Can machines think?’ with the ‘closely related’Footnote 35 question whether a machine can react to input with output that makes a human believe it thinks. In effect, Turing demands that if the output is deemed intelligent (in the second sense), then the machine should be called intelligent (in the first sense). Due to the setup of the Turing Test, this can only be a pragmatic criterion and not a proof. It is no wonder the Turing Test has led to persistent confusions. The confusion of the two kinds of ‘intelligent’ and confusions with regard to the interpretation of the Turing Test are pre-programmed in its setup.
Especially confusing is the source of the meaning of the texts the evaluator receives. On the one hand, the texts may appear to be produced in an understanding manner, on the other hand, the evaluator is withheld any knowledge of how they were produced. In general, to understand texts, their constituting words and symbols must not only be recognized as such but also be understood.Footnote 36 In the Turing Test, it is the human evaluator who reads the texts and understands their meaning. Assumedly, the human in one room, too, understands what the texts mean, but the setup renders irrelevant whether this really is the case. Both the human and the machine may not have understood the texts they produced. The only thing that matters is whether the evaluator believes that the respective texts were produced by a human. The evaluator will only believe that the texts were produced by a human, of course, when they appear to express an understanding of their semantic meaning. The fact that the texts written by the human and produced by the machine need to be interpreted is easily overlooked because the interpretation is an implicit part of the setup of the Turing Test. By interpreting the texts, the evaluator adds the meaning that is often ascribed to the AI output.
The texts exchanged in the Turing Test have very different relevance for humans and for computers. For digital computation, the texts are relevant only with respect to their syntax. They constitute mere sets of data, and data only in its syntactic form, regardless of what it refers to in the world, or, indeed, whether it refers to anything. For humans, data means more than syntax. Like information, data is a concept that is used in fundamentally different ways. Elsewhere I distinguished different senses of information,Footnote 37 but for reasons of simplicity this chapter speaks only of data, and only two fundamentally different concepts of data will be distinguished.
On the one hand, the concept of data is often used syntactically to signify symbols stored at specific memory locations that can be computationally processed. On the other hand, the concept of data is used semantically to signify meaningful information about something. Semantic meaning of data paradigmatically refers to the world we live in, such as the datum ‘8,849’ for the approximate height of Mount Everest. Data can represent things, relations, and temporal developments in the world, including human bodies, and they may also be used to simulate aspects of the real or a potentially existing world. Furthermore, data can represent language that is not limited to representative data. Humans only sometimes use data to engage in a communication and talk about something in the shared world. They are even less often concerned with the syntactic structure of data. Quite often, texts can convey all kinds of semantic content: besides information, they can convey moods, inspire fantasy, cause insight, produce feelings, and challenge the prejudices of their readers.
To highlight that data can be used to represent complex structures of all kinds, I here also speak of ‘digital knowledge.’ Like data, there is a syntactic and a semantic meaning of digital knowledge. Computers operate on syntactic relations of what constitutes semantic knowledge once it appropriately represents the world. The computer receives syntactic data as an input and then processes the data according to syntactic rules to deliver a syntactically structured output. Syntactic data processing can be done in different ways, for example, by means of logical gates, neuronal layers, or quantum computing. Despite the important differences between these methods of data processing, they are still syntactic methods of data processing, of course. Data processing is at the core of computational AI.
If we want to consider whether a computer has intelligence by itself, the fundamental question is whether certain transformations of data can constitute intelligence. Making the machine look like a human does not fundamentally change the question. In this regard, Turing is justified when he claims that there ‘was little point in trying to make a “thinking machine” more human by dressing it up in such artificial flesh.’Footnote 38 Most likely, doing so would only lead to complications and confusions. Because the core work of computing is syntactic symbol-manipulation, the restriction to texts is appropriate with regard to the core workings of computational AI.
The intelligence to be found here, however, can only concern the second sense of ‘intelligent’ that does not involve semantic understanding. The fact that mere syntactic operations are not sufficient for semantic understanding has been pointed out by numerous philosophers in the context of different arguments. Gottfried Wilhelm Leibniz holds ‘that perception and that which depends upon it are inexplicable on mechanical grounds.’Footnote 39 John Searle claims that computers ‘have syntax but no semantics,’Footnote 40 which is the source of the ‘symbol grounding problem.’Footnote 41 Hubert Dreyfus contends that there are certain things a certain kind of AI, such as ‘symbolic AI,’ can never do.Footnote 42 Recent researchers contend that ‘form […] cannot in principle lead to learning of meaning.’Footnote 43 All these arguments do not show that there is no way to syntactically model understanding, but rather that no amount of syntactic symbol-manipulation by itself amounts to semantic understanding. There is no semantic understanding in computation alone. The search for semantic understanding in the computational core of AI looks at the wrong place.
The point of this chapter is not to contribute another argument for the negative claim that there is something computation cannot do. The fundamental difference between syntactic data and semantic meaning does not mean that syntactic data cannot map structures of semantic meaning or that it could not be used to simulate understanding behaviour. According to Husserl, data can ‘dress’ the lifeworld like a ‘garb of ideas,’Footnote 44 which fits the lifeworld so well that the garb is easily mistaken for reality in itself. Because humans are also part of reality, it easily seems like the same must be possible for humans. Vice versa, data can cause behaviour (e.g., of robots) that sometimes resembles human behaviour in such a perfect manner that it looks like conscious behaviour. At least with regard to certain behaviours it is possible that an AI will appear like a human in the Turing Test or even in reality, even though this is much harder than usually thought.Footnote 45
The point of differentiating between syntactic computation and semantic meaning in this chapter is to build bridges rather than to dig trenches. To understand how the two can cooperate, we need to understand how they are embedded in a wider context. Although it is futile to look for meaning and understanding in the computational core of AI, this is not the end of the story. Even when AI systems by themselves do not experience and understand, they may take part in a wider context that also comprises other parts. To make progress on the question of how AI can meaningfully integrate into the lifeworld, it is crucial to shift the perspective away from the computational AI devices and applications alone toward the AI in its wider context.
The Turing Test can again serve as an example of the embeddedness of the AI in a wider context. By withholding from the evaluator any knowledge of how the texts are processed, the Turing Test stands in the then-prevailing tradition of behaviourism. The Turing Test sets up a ‘black box’ in so far as it hides from the evaluator all potentially relevant information and interaction apart from what is conveyed in the texts. By making the evaluator part of the test, however, Turing goes beyond classical behaviourism. The content of the texts may enable inferences to the mental processes of the author such as motivations and reasoning processes, inferences which the evaluator is likely to use to decide whether there is a human behind the respective channel. By allowing such inferences, the Turing Test is closer to cognitivism than behaviourism. Yet, making the evaluator part of the setup is not a pure form of cognitivism either. To come to a decision, the (human) evaluator needs to understand the meaning of the texts and reasonably evaluate them. By making the evaluator part of the test, understanding of semantic meaning becomes an implicit part of the test. The setup of the Turing Test as a whole constitutes a bigger system, of which the AI is only one part. The point here is not that the system as a whole would understand or be intelligent, but that only because the texts are embedded in the wider system, they are meaningful texts rather than mere objects.
Data is another important part of that bigger system. For the AI in the Turing Test, the input and output texts constitute syntactic data, whereas for the evaluator they have semantic meaning. The semantic meaning of data goes beyond language and refers to things in the world we live in. The lifeworld is hence another core part of the bigger system and needs to be considered in more detail.
VI. The Overlooked Lifeworld
The direct comparison of AI with humans overlooks the fact that AI and humans relate to the lifeworld in very different ways, which is the topic of this section. As mentioned in the introduction, AI systems such as autonomous cars need not only navigate the physical world but also the lifeworld. They need to recognize a stop sign as well as the intentions of other road users such as pedestrians who want to cross the road, and act or react accordingly. In more abstract terms, they need to be able to recognize and use the rules they encounter in their environment, together with regulations, expectations, demands, logic, laws, dispositions, interconnections, and so on.
Turing had recognized that the development and use of intelligence is dependent on things that shape how humans are embedded in, and conceive of, the world, such as culture, community, emotion, and education.Footnote 46 Nevertheless, and despite the incompatibilities discussed in the last section, behaviourists and cognitivists assume that in the Turing Test all of these can be ignored when probing whether a machine is intelligent or not. They overlook that the texts exchanged often refer to the world, and that their meaning needs to be understood in the context of what they say about the world. Because the texts consist outwardly only of data, they need to be interpreted by somebody to mean something.Footnote 47 By interpreting the texts to mean something, the evaluator adds meaning to the texts, which would otherwise be mere collections of letters and symbols. Here, the embeddedness of the evaluator into the lifeworld – including culture, community, emotion, and education – as well as inferences to the lifeworld of the human behind the channel come into play.
The realization that the limitation to textual exchanges captures only part of human intelligence has led to alternative test suggestions. Steve Wozniak, the co-founder of Apple Inc., proposed the AI should enter the house of a stranger and make a cup of coffee.Footnote 48 The coffee test is an improvement over the Turing Test in certain respects. The setup of the coffee test does not hide the relation of the output of the AI to the lifeworld; to the contrary, it explicitly chooses a task that seems to require orientation in the lifeworld. It involves an activity that is relatively easy for humans (but may be quite intricate), who can make use of their common-sense knowledge and reason, to find their way in a stranger’s home. While the Turing Test may involve common sense, for instance to understand or to answer certain questions, this involvement is not as obvious as it is in the coffee test. There are several questions about the coffee test, however. The action of making coffee is much simpler than engaging in open-ended exchanges of meaningful text and may be solved in ways that in fact do only require limited orientation in the physical world rather than general orientation in the lifeworld. Most important in our context is, however, that, like the Turing Test, Wozniak’s test still attempts to directly compare AI with human capabilities. As argued above, this is not apt to adequately capture the strengths of AI and is likely to lead to misrepresentations of the relation of the AI system to the lifeworld.
The relation of the AI system to the lifeworld is mediated through input and output consisting of data, regardless of whether the data corresponds to written texts or is provided by and transmitted to interfaces. Putting a robotic body around a computational system does make a difference in that it enables the system to retrieve data from sensors and interfaces in relation to movements initiated by computational processing. But it doesn’t change the fact that, like any computational system, ultimately the robot continues to relate to the lifeworld by means of data. The robotic sensors provide it with data, and data is used to steer the body of the robot, but data alone is not sufficient for experience and understanding. Like any machine, the robot is a part of the world, but it does not have the same intentional relation to the world. Humans literally experience the lifeworld and understand meaning, whereas computational AI does not literally do so – not even when the AI is put into a humanoid robot. The outward appearance that the robot relates to the world like a living being is misleading. Computational AI thus can never be integrated in the lifeworld in the same way humans are. Yet, it would plainly be wrong to claim that they do not relate to the lifeworld at all.
Figure 5.2 shows the fundamental relations between humans and AI together with their respective relations to data and the lifeworld that are described in this chapter. Humans literally experience the lifeworld and understand meaning, whereas computational AI receives physical sensor input from the lifeworld and may modify physical aspects of the lifeworld by means of connected physical devices. AI can (1) represent and (2) simulate the lifeworld, by computing (syntactic) data and digital knowledge that corresponds to things and relations in the lifeworld. The dotted lines indicate that data and digital knowledge do not represent and simulate by themselves. Rather, they do so by virtue of being appropriately embedded in the overall system delineated in Figure 5.2. The AI either receives sensor or interface input that is stored in digital data and which can be computationally processed and used to produce output. The output can be used to modify aspects of the lifeworld, for example, to control motors or interfaces that are accessible to other computing systems or to humans.
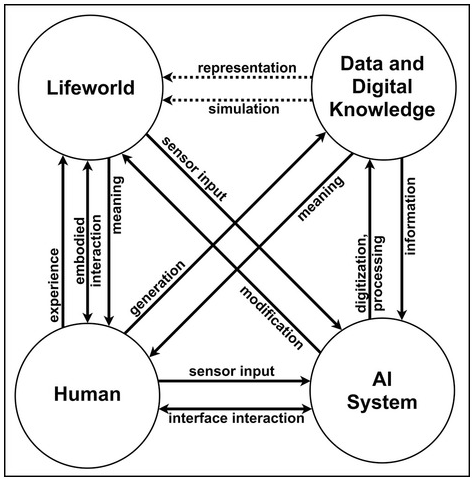
Figure 5.2 The fundamental relations between humans, AI, data, and the lifeworld
In contrast to mere computation, which only operates with data, AI in addition needs to intelligently interact in the lifeworld. Even in the Turing Test, in spite of the restriction of the interactions to textual interchange rather than embodied interactions, the lifeworld plays a crucial role. From the discussion of the test, we can extract two main reasons: (1) the textual output needs to make sense in the context of the lifeworld of the evaluator, and (2) even though exchanges by means of written texts are rather limited, the exchange is carried out via a channel in the lifeworld of the evaluator. The interchange itself happens in the lifeworld, and the AI needs to give the impression of engaging in the interchange.
In other applications of AI technology, AI devices are made to intelligently navigate and modify the lifeworld, as well as interact in it. As pointed out in Section VI, autonomous cars need to take into account the behaviour of human road users such as human drivers and pedestrians. The possibly relevant behaviour of human road users is generally neither the result of strict rule-following nor is it just random. Humans often behave according to their understanding of the situation, their aims, perspectives, experiences, habits, conventions, etc. Through these, humans direct themselves to the lifeworld. Humans experience the lifeworld as meaningful, and their behaviour (mostly) makes sense to other members of the same culture.
Relating to the lifeworld in intelligent ways is an exceptionally difficult undertaking for computational AI because it needs to do so by means of data processing. As acknowledged above, there is a radical difference between syntactic data processing and experience and understanding, a difference that cannot be eliminated by more syntactic data processing. This radical difference comes through in the difference of, on the one hand, data and digital knowledge, and, on the other, the lifeworld. As discussed above, syntactic data and digital knowledge need to be interpreted to say something about the lifeworld, but such interpretation cannot be done by data processing. The difference between syntactic data processing and experience and understanding must be bridged, however, if AI is supposed to intelligently interact in the lifeworld. The combination of the need to bridge the difference and the impossibility of doing so by data processing alone looks like an impasse if we limit the view to the AI and the processing of data and digital knowledge.
We are not stuck in the apparent impasse, however, if we take into account the wider system. The wider system bridges the gap between, on the one hand, data and digital knowledge, and, on the other, the lifeworld. Bridging a gap is different from eliminating a gap, as the difference between both sides remains. All bridges are reminders of the obstacle bridged. Bridges are pragmatic solutions that involve compromises and impose restrictions. In our case, data and digital knowledge do not fully capture the world as it is experienced and understood but rather represent or simulate it. The representation and simulation are made possible by the interplay of the four parts delineated in the diagram.
Biomimetics can certainly inspire new engineering solutions in numerous fields, and AI research especially is well-advised to take a more careful look at how human cognition really operates. I argued above that a naïve understanding of human cognition has led to misguided assessments of the possibilities of AI. The current section has given reasons for why a better understanding of human cognition needs to take into account how humans relate to the lifeworld.
It would be futile, however, to exactly rebuild human cognition by computational means. As argued in Section III, the comparison of human and artificial intelligence has led to profound misconceptions about AI, such as those discussed in Sections IV and V. The relation of humans to their lifeworld matters for AI research, not because AI can fully replace humans but because AI relates to the lifeworld in particular ways. To better understand how AI can meaningfully integrate into the lifeworld, the role of data and digital knowledge needs to be taken into account, and the interrelations need to be distinguished in the way delineated in Figure 5.2. This is the precondition for a prudent assessment of both the possibilities and dangers of AI and to envision responsible uses of AI in which technology and humans do not work against but with each other.



 Open access
Open access