
569 results
Assessment and Management of Eating Disorders at Community CAMHS in South Lanarkshire: A Quality Improvement Project
-
- Journal:
- BJPsych Open / Volume 10 / Issue S1 / June 2024
- Published online by Cambridge University Press:
- 01 August 2024, pp. S159-S160
-
- Article
-
- You have access
- Open access
- Export citation
How Are Inpatient Psychiatric Ward Rounds Understood in Research Literature? A Scoping Review
-
- Journal:
- BJPsych Open / Volume 10 / Issue S1 / June 2024
- Published online by Cambridge University Press:
- 01 August 2024, pp. S69-S70
-
- Article
-
- You have access
- Open access
- Export citation
Equally spaced squares and some impossible identities
-
- Journal:
- The Mathematical Gazette / Volume 108 / Issue 572 / July 2024
- Published online by Cambridge University Press:
- 23 August 2024, pp. 201-208
- Print publication:
- July 2024
-
- Article
- Export citation
Western Safflower Contracting Strategies
-
- Journal:
- Journal of Agricultural and Applied Economics / Volume 56 / Issue 2 / May 2024
- Published online by Cambridge University Press:
- 19 March 2024, pp. 216-233
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Estranging the loop
-
- Journal:
- Finance and Society / Volume 6 / Issue 2 / 2020
- Published online by Cambridge University Press:
- 09 November 2023, pp. 146-147
-
- Article
-
- You have access
- Open access
- Export citation
Evaluation of appropriate transmission-based precautions for non-SARS-CoV-2 respiratory viruses
-
- Journal:
- Antimicrobial Stewardship & Healthcare Epidemiology / Volume 3 / Issue 1 / 2023
- Published online by Cambridge University Press:
- 31 October 2023, e193
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Various perspectives on a pair of simple inequalities for log x
-
- Journal:
- The Mathematical Gazette / Volume 107 / Issue 570 / November 2023
- Published online by Cambridge University Press:
- 11 October 2023, pp. 430-437
- Print publication:
- November 2023
-
- Article
- Export citation
-
The basic inequalities
The inequalities in question are(1)
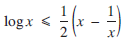
and(2)
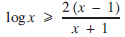
for x > 1.


Fourier coefficients of
 ${1 \over {\sin \,\theta }}$ and
${1 \over {\sin \,\theta }}$ and  ${\theta\over {\sin \,\theta }}$
${\theta\over {\sin \,\theta }}$
-
- Journal:
- The Mathematical Gazette / Volume 107 / Issue 570 / November 2023
- Published online by Cambridge University Press:
- 11 October 2023, pp. 412-421
- Print publication:
- November 2023
-
- Article
- Export citation
-
Recall that for a 2π-periodic function f , the Fourier coefficients on the interval (–Π, Π) are
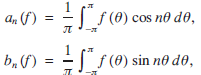
and the Fourier series for f is





On 107.27
-
- Journal:
- The Mathematical Gazette / Volume 107 / Issue 570 / November 2023
- Published online by Cambridge University Press:
- 11 October 2023, p. 549
- Print publication:
- November 2023
-
- Article
- Export citation
Outcomes of high-dose oral beta-lactam definitive therapy compared to fluoroquinolone or trimethoprim-sulfamethoxazole oral therapy for bacteremia secondary to a urinary tract infection
-
- Journal:
- Antimicrobial Stewardship & Healthcare Epidemiology / Volume 3 / Issue 1 / 2023
- Published online by Cambridge University Press:
- 08 September 2023, e148
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Approximating Lipschitz and continuous functions by polynomials; Jackson’s theorem
-
- Journal:
- The Mathematical Gazette / Volume 107 / Issue 569 / July 2023
- Published online by Cambridge University Press:
- 03 July 2023, pp. 273-285
- Print publication:
- July 2023
-
- Article
- Export citation
-
The celebrated theorem of Weierstrass, dating from 1885, states that continuous functions can be uniformly approximated by polynomials on any bounded, closed interval. But just how well can we approximate by polynomials of a certain degree? Let us introduce some notation to facilitate the discussion. For an interval I (which will usually be
 ), denote by C (I) the space of continuous functions on I, and write
), denote by C (I) the space of continuous functions on I, and write  for
for  (the notation
(the notation  is often used). Uniform convergence of fn to f (on I) equates to the statement that
is often used). Uniform convergence of fn to f (on I) equates to the statement that  . Denote by
. Denote by  the space of polynomials of degree not more than n. This is a linear subspace of C (I) of dimension n + 1. We write
the space of polynomials of degree not more than n. This is a linear subspace of C (I) of dimension n + 1. We write
 ), denote by
), denote by  for
for  (the notation
(the notation  is often used). Uniform convergence of
is often used). Uniform convergence of  . Denote by
. Denote by  the space of polynomials of degree not more than
the space of polynomials of degree not more than 
Hardy’s inequality for averages
-
- Journal:
- The Mathematical Gazette / Volume 107 / Issue 568 / March 2023
- Published online by Cambridge University Press:
- 16 February 2023, pp. 25-34
- Print publication:
- March 2023
-
- Article
- Export citation
Three-day ceftriaxone versus longer durations of therapy for inpatient treatment of uncomplicated urinary tract infection
-
- Journal:
- Antimicrobial Stewardship & Healthcare Epidemiology / Volume 2 / Issue 1 / 2022
- Published online by Cambridge University Press:
- 21 October 2022, e171
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
10 - Steady State Problems
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp 330-366
-
- Chapter
- Export citation
Acknowledgments
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp xvii-xviii
-
- Chapter
- Export citation
Appendix F - Turbulence Models
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp 583-588
-
- Chapter
- Export citation
Dedication
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp vii-viii
-
- Chapter
- Export citation
2 - Mathematical Models of Fluid Flow
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp 10-41
-
- Chapter
- Export citation
Preface
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp xv-xvi
-
- Chapter
- Export citation
Appendix C - Polynomial Interpolation, Differentiation, and Integration
-
- Book:
- Computational Aerodynamics
- Published online:
- 12 August 2022
- Print publication:
- 01 September 2022, pp 527-543
-
- Chapter
- Export citation
